
2012-04-01碳纤维复合材料是一种新型的非金属材料,具有高比强、高比模、耐疲劳、抗蠕变、耐高温、耐腐蚀、耐磨损、尺寸稳定、导电、导热、热膨胀系数小、自润滑和吸能抗振等一系列优异性能。碳纤维复合材料的另一重要特性就是比重小。比重一般在1.6左右,是铝的1/...

2012-03-31 拱架机器人、SCARA机器人、关节型机器人或并联机器人–仅需一个自动化平台即可实现任何加工步骤。采用Beckhoff基于PC的控制技术,可以控制并监视各加工机械和整个生产线的所有工艺流程:进料、封接(焊接、粘合等)、装配、检验、搬运和堆...
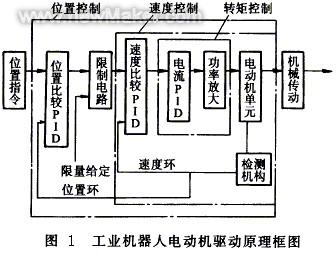
2012-03-31 机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。 对工业机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机...

2012-03-31对几何形状变化不定的物体,也就是说对形状和尺寸各不相同的物体的抓取,技术研究的重点放在一种灵活的低成本抓具(即IPA抓手)的研发上。 在许多技术领域,工业抓具大多结合操作任务来设计。除了大部分做成两爪式或三爪式的机械抓具之外,也经常采用...
2012-04-01当今,电子设备已演变成多功能、高密度、小型化,造成部件与部、部件与焊盘之间的空间越来越小。目前,全世界使用手机的人数已超过21亿,另外,混合动力为代表的汽车电子装置占的比例越来越大,在未来5年会占到车载部品的40%左右。随着人们对环境保护的...
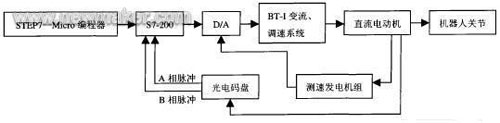
2012-03-311 引言 随着现代科学技术的发展,PLC己广泛地应用于工业控制微型计算机中。 目前,工业机器人关节主要是采用交流伺服系统进行控制,本研究将技术成熟、编程方便、可靠性高、体积小的SIEMENS S-200可编程控制器,应用于可控环流可逆调...
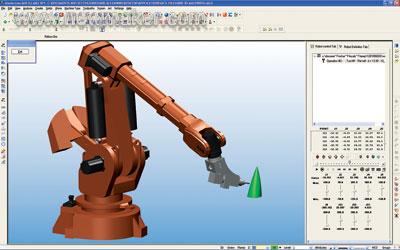
2012-03-30采用与多轴机床中相同的CAM软件给机器人编程,不需要采用手工的方式缓慢地进行点到点的“教育”,并将这些点到点的运动记录下来作为机器人的动作指令。Robotmaster机器人大师是一套计算机软件包,它可为机器人提供CAD/CAM为基础的脱机编...

2012-03-29本文介绍巨能机器人为某水泵生产厂家设计的自动化无人加工工厂的方案。自动化工厂由水泵端盖组件生产线、内外轴承组件生产线和水泵座生产线3 条线组合在一起,按照30 米跨的厂房规格进行设计,厂房头部和两侧预留4 米宽的通道,中间为生产线主体,生产...
2012-03-29工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构...
2012-03-29注塑加工商们常常是在更新注射成型机或机械手方面深思熟虑。然而,很少有人关注过机械手臂末端工具(简称EOAT)的使用。其实,在注塑成型过程中,EOAT却是一个相当重要的部分。 如果注塑加工商希望机械手能够完成对制品的拾取、放置、移动、搬运...
2012-04-01项目概述:本项目是我公司为一国内著名机器人自动化公司配套的小型全自动化产品打标,分选和并箱生产线。工作要求是每个托盘里装有18个工业产品,它由传送带运送到一台三维打标机器人工作区域内,对每个产品进行激光打标。当把全部产品都打标完后,整个托盘...

2012-03-28地面机器人系统通常用于人工介入成本过高、危险过大或者效率过低的任务。在许多情况下,机器人必须能够自主工作,利用导航系统来监视并控制它从一个位置移到另一个位置。管理位置和运动时的精度是实现有用、可靠的自主工作的关键。MEMS(微机电系统)陀螺...

