

ABB机器人系统备份与冷启动
发布日期:2012-06-10 兰生客服中心 浏览:5576
一、系统备份:
系统应用软件的不完整将使机器人发生故障后的恢复十分困难!一定要按以下步骤做好系统备份。
 其他窗口--->System Parameters--->
其他窗口--->System Parameters---> 回车
回车
·系统备份:
菜单键File--->3Backup…--->回车--->功能键Unit选择存储单元--->功能键NewDir建立存储子目录--->功能键OK确认建立新子目录--->功能键OK确认存储路径--->功能键OK确认储存。
二、系统恢复:
·进入服务窗口:
 其他窗口--->System Parameters--->
其他窗口--->System Parameters---> 回车
回车
·恢复系统:
菜单键File--->4Restore…--->回车--->选择路径,将光标移至储存的子目录--->功能键OK确认存储路径--->功能键OK确认恢复--->输入初始密码007-->功能键OK确认。
三、系统冷启动:
系统冷起动使系统清盘,系统硬件全面自检。
1、Warm-Start:
 其他窗口--->Service--->
其他窗口--->Service---> 回车--->菜单键File--->Restart…--->回车--->功能键OK
回车--->菜单键File--->Restart…--->回车--->功能键OK
2、C-Start:
其他窗口--->Service--->回车--->菜单键File--->Restart…--->回车--->输入数字键1,3,4,6,7,9--->功能键C-Start
3、X-Start:
其他窗口--->service--->回车--->菜单键 File--->Restart…--->回车--->输入数字键1,5,9--->功能键X-Start(IRBM2000机器人)
四、标定机器人零位:
1、操纵机器人至零位:
·以单轴运动方式操纵机器人。
·将机器人各个轴移至标记位置。
2、进入机器人服务窗口:
 其他窗口--->Service--->回车
其他窗口--->Service--->回车
3、标定机器人:
菜单键View--->3Calibration--->菜单键Calib--->1Rev.CounterUpdate…--->功能键All--->OK--->OK机器人各轴标定尽量同时进行,必须做到先二轴后三轴,先五轴后六轴。
上一篇:ABB机器人的文件管理
下一篇:ABB机器人输入输出信号
-
FANUC机器人示教
一、安全操作规程1、示教和手动机器人(1)请不要带者手套操作示教盘和操作盘。 (2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 (3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 (4)要预先考虑好避让机
2012-06-11 -
FANUC机器人的执行程序
一、程序中断和恢复程序中断由以下两种情况引起:■ 程序运行中遇到报警■ 操作人员停止程序运行 程序的中断状态有两种类型: 有意中断程序运行的方法:■ 按下TP或操作箱上的急停按钮,还有可以输入外部E-STOP信号。 输入UI[1] *
2012-06-11 -
FANUC机器人程序结构
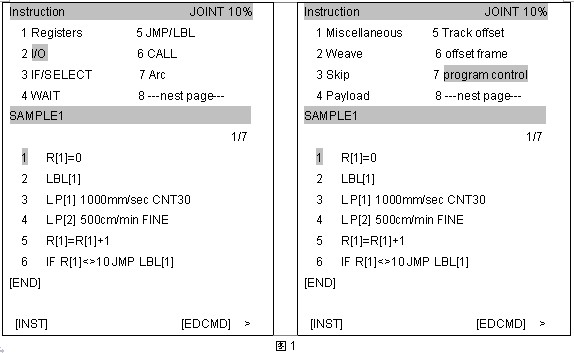
一、运动指令运动指令已经在编程一章中讲过,在这里我们重点讨论弧焊指令,寄存器指令,I/O指令,分支指令,等待指令,偏置指令,程序控制指令和其他常用的指令。这些指令都是通过程序编辑画面中的[INST]进入的(见图1) 注意:不同的软件,
2012-06-11 -
FANUC机器人FRAMES的设置
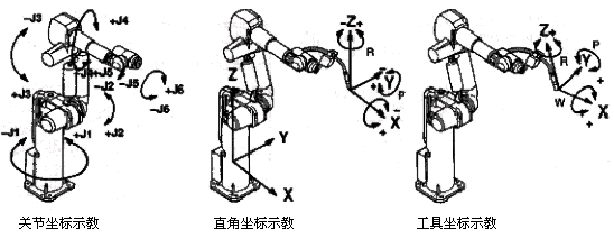
一、坐标系的分类(见表1) 表1 World Frame(通用坐标系) 是一个不可设置的缺省坐标系。其原点是用户坐标系和点动坐标系的参考位置,位于机器人内预先定义的位置。 ToolFrame(工具坐标
2012-06-11

