

焊接机器人焊接铰接架
发布日期:2012-04-01 兰生客服中心 浏览:5273
一、概述
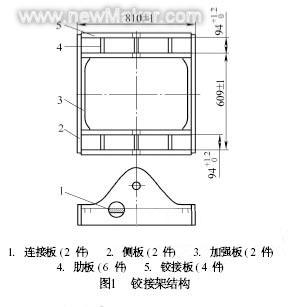
山东临沂工程机械股份有限公司引进了奥地利I GM 公司生产的全关节、电驱动焊接机器人,它由机械臂、控制柜、焊接电源、编程器、变位机、供气系统及冷却系统等组成。在安装调试完毕后,公司决定在装载机铰接架(见图1) 上进行焊接试验,期望获得一些使用经验,以便对下料、组对夹具、工时定额以及操作人员进行调整,使之适应焊接机器人焊接需要。
二、过程综述
1. 半自动二氧化碳气体保护焊工艺
为了便于与手工焊接进行对比,刚开始对铰接架进行焊接编程时,完全采用了手工半自动二氧化碳气体保护焊操作工艺。
手工焊接操作工艺如下:
( 1) 检查各下料件尺寸,表面含有油、锈及水等杂物的件转回上道工序清除。
( 2) 将焊件安放在铰接架组对夹具上定位、夹紧,确保图1 中尺寸94mm、609mm 分别放量至95mm、611mm;用CO2 焊机点固,点固规范是: 电流220A,电压24 V。
( 3) 将焊件吊出夹具,用卷尺重新检查尺寸是否符合要求,在放量尺寸内嵌入刚性支撑圆钢,防止焊后收缩过大。
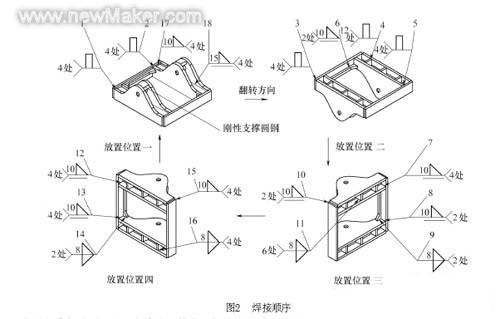
( 4) 转至焊接处,装夹在简易焊接变位机上施焊,焊接规范是: 电流26 ~320A,电压28~34V,焊接速度35~45cm/min ,焊丝伸出长度10 ~15mm,保护气流量15 ~20L/ min 。焊缝焊脚高度见图2 ,放置位置及焊接顺序按图2 编号顺序进行。焊脚高度超过8mm 的焊缝,必须采用多层多道焊,以减少焊接变形。
( 5) 焊接完毕,清除飞溅物。
( 6) 待焊件冷至室温后,去掉刚性支撑圆钢,检查焊接后的收缩尺寸是否符合图样要求。如不符合要求,用氧- 乙炔火焰校正。
2. 焊接机器人试焊产生的问题
按上述工艺用焊接机器人编程试焊时,产生了如下问题:
( 1) 焊接焊缝长度<30mm 的封头焊缝(见图2 中1、2、3、4、5焊缝) 时,起始和结束位置不易控制,焊接熔池的钢液极易沿焊缝末端流出,形成瘤挂。
( 2) 由于各个肋板未被准确定位,喷嘴碰到肋板导致停机,即使勉强焊接,焊缝也很不美观。
( 3) 由于组对时焊缝间隙不均匀,所以在间隙较大处,电弧容易烧穿。
( 4) 焊接打底焊缝时,由于电流电压较小,焊丝伸出长度较短,喷嘴易与焊件碰撞。
( 5) 焊接后的焊件焊接变形量比手工焊接要大2~3mm。我们分析是由于机器人焊接时,其焊缝穿透深度比手工焊接要深造成的。
( 6) 焊接过程中,质量缺陷( 气孔,表面裂纹等)不易被及时发现,一旦出现,整条焊缝都受影响,焊后须花费较大精力清除掉。
3. 解决措施
针对上述问题,我们采取了如下措施:
( 1) 在铰接架组对胎具上,添加各个肋板定位基准,保证肋板定位准确。
( 2) 为了使焊后的铰接架满足图样要求,减少火焰校正件数,我们将连接板的下料宽度由94mm 改为95mm,同时将刚性支撑圆钢长度增加1. 5mm。
( 3) 取消焊接机器人对封头焊缝的焊接,增加人工溜缝工步,在铰接架组点完成后,对焊缝间隙过大处进行小电流打底焊,同时对封头焊缝进行焊接。
( 4) 机器人焊接时,增加机器人对焊缝位置的寻位点数;尽量采用船形焊接;在工艺要求范围内,通过适当提高焊接规范,增加气流量,焊丝伸出长度和操作人员加强跟踪等方法减少焊接机器人焊接缺陷及焊件的碰撞。
( 5) 添加一台碳弧气刨设备,及时对有焊接质量缺陷的焊缝刨除后重焊。
经过上述改进,机器人焊接的优势被发挥了出来。
三、启示
通过对焊接机器人从试焊到正常使用这一过程的跟踪和观察,我们得到如下启示:
( 1) 机器人焊接同其他自动焊接设备一样,特别适合焊接焊缝位置准确又便于寻位,自动跟踪时不发生磕碰的外观长焊缝,对于短焊缝及复杂内部焊缝,由于翻转次数和磕碰原因,反而不能有效地发挥其优势。这就要求我们从工艺甚至设计上适应这一要求。
( 2) 由于焊接机器人被示教编程后自动寻找焊缝位置,这就对组点的焊件的位置尺寸稳定性提出了严格要求,包括那些图样要求不重要的位置尺寸,都要设法定位点固,否则机器人焊接时可能由于寻位不准确产生各种焊接缺陷。
( 3) 操作人员的素质和技能是焊接机器人能否正常使用的关键因素。在本次试焊过程中,编程者既是机器人的操作者又是手工焊操作者和有缺陷焊缝的清除者,需要操作多种设备,必须具有较强的责任心和技能,因而应给予相应的待遇。
四、结语
焊接机器人的使用带来的不仅仅是工人劳动强度的降低和焊接质量的提高,更主要的是对工艺和操作技能的挑战。通过本次试焊,为我们管好、用好机器人以及利用机器人焊接其他产品积累了宝贵经验。
上一篇:智能机器人实现产品自动化包装搬运
下一篇:六轴机器人使塑料产品产量翻番
-
浅析工业机器人与数控机床的融合应用
随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。 鉴于机器人研制以及与机床
2015-08-27 -
焊接机器人的主要技术指标

选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人
2015-06-15 -
导电滑环在机器人生产中的应用
现代,随着工业自动化的快速发展,工业机器人已经应用在各种场合,在这种背景下,工业机器人逐渐取代一些劳动强度大、作业环境恶劣的工作。专家研究认为,我国工业机器人的市场主要在汽车、摩托车、电器、工程机械、石油化工等行业,企业对技术进步的需求更加
2015-05-13 -
压力传感器在喷涂机器人上应用

喷涂机器人又叫喷漆机器,是可进行自动喷漆或喷涂其他涂料的工业机器人。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,机体多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动
2015-04-27



