

大型油罐喷砂除锈的机器人设备
发布日期:2012-04-01 兰生客服中心 浏览:8941
1喷砂除锈机器人整体结构布置
系统的整体布置图如图1所示。喷砂除锈机器人借助罐顶中央孔,安装一个中心旋转轴,靠轴的支撑,安装一个与油罐轮廓线相似的小车导轨,导轨的下端装电动机,电动机在罐底平面驱动珩架做圆周运动,以带动导轨沿圆柱面转动;机械手行走小车能在卷扬机钢丝绳的牵引下沿导轨有规律地上下移动;机械手行走小车上安装机器人的一个机械臂,该机械臂的小臂既能上下俯仰也能前后伸缩,大臂在小臂的带动下也能上下俯仰,同时自身也能伸缩运动,而手腕的凸轮转动可带动喷枪匀速上下摆动,几个关节运动的有机结合可以实现喷枪始终与受喷面最佳喷射角度(30°~75°)和距离(300mm~500mm)。机械臂的作业空间大,能够满足顶部锥面、锥面-柱面联结处等与导轨之间距离变化较大的空间的除锈需求。考虑到油罐进出口狭小,整个机器人结构设计轻巧并便于拆装。
2机械手及机械手行走小车
由图2可知:机械手由大、小臂和喷枪组成,喷枪安装在大臂上,大臂在气缸的控制下可以上下摆动;喷枪也可以在凸轮作用下,完成各个动作的定位以达到最佳喷射角度;采用了停-升-停型的等速凸轮机构,其结构简单、紧凑;机械手固定在小车上,可以随小车上下移动;由于小车导轨是竖直的,所以我们采用“双轮结构”把小车卡在导轨上,同时为防止小车横向偏移,我们在小车的中部加有一个导向轮。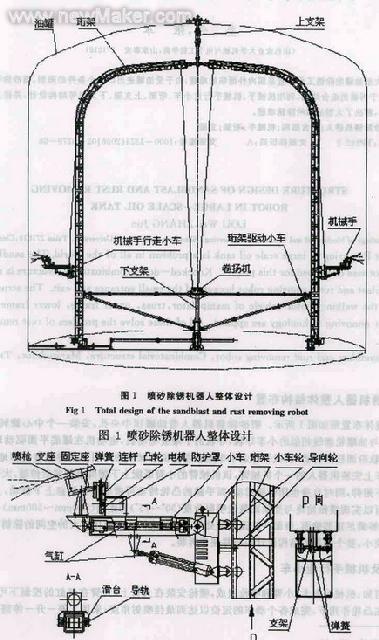
图2机械手及机械手行走小车设计图
3珩架驱动小车
珩架驱动小车不仅是一个行走机构,同时也是一个主要的承重部件,它的主要作用是带动珩架绕油罐中心作圆周运动,从而配合机械手完成对油罐内壁除锈任务。由图3可知,小车主要由车轮、同步带、电机、和减速器等四部分组成。为了防止沙垢堆积阻碍小车正常行走,小车前端装设了强力吸尘器,及时排出轨道上的沙尘。另外为了保证小车的稳定性和设计的科学性我们采用了两项辅助措施:
(1)我们在珩架和走轮之间增设一个弹簧,用来减少在珩架行走过程中由于机械摇动而产生振动的副面影响。
(2)为增加驱动小车的附着力,在小车上增设一定重量的配重块来提供足够的摩擦力。
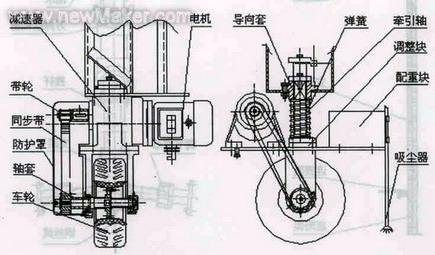
图3珩架驱动小车设计图
4珩架
珩架(如图4)的主要作用是为小车提供导轨,使小车能上下平稳移动。受工作环境限制,同时为了搬运、拆装方便,我们采用分段设计法把整个珩架分成五部分设计。由图可知,组成整个珩架的五部分分别是:底珩架,连接架,立珩架,曲珩架,横珩架。曲珩架实现了小车由立珩架到横珩架的平滑过度,大大减小了小车沿珩架转弯滑行的阻力。整个珩架的外形模仿油罐的曲线。此种设计形式是喷砂除锈工作质量的重要保证,正是因为这样小车在上下滑动的过程中才能有效确保喷枪与油罐内壁的距离变化微小,避免了机械手的频烦伸缩,从而减少了机械手的操作难度,提高作业效率,减轻操作者的劳动强度,更有利于以后的编程控制。分段设计法是一种开放性的设计方法,它可以根据罐高适当增减珩架数量,灵活的组合以满足不同高度的油罐,达到了一架多用的目的。整个珩架采用八字角铁作为紧固件。其目的是在满足牢固性的前提下,尽量减轻珩架自重,节约原材料降低成本,而且能使珩架变得更加轻巧。
5上支架
上支架(如图5)主要由上盖、万向联轴器、接杆和连接支座组成。主要作用是固定珩架。上盖内部通过两套轴承有效支撑着轴端,保证了整个珩架可以在小车的带动下平滑、稳定转动。万向联轴器实现了柔性链接,可减小由设计误差和安装误差所带来的机械侧应力,提高整个系统的稳定性。上支架通过连接支座把两侧珩架连接成一个整体,然后再通过调节螺母来有效调节整个珩架的重心,并尽量使其与回转中心点重合。珩架顶部的钢丝绳与底部支架相连,用来调整整个支架,使之始终与油罐底面垂直,这样受力和变形比较均匀,能够保证其运动的平稳性,并能有效减少整体的振动。
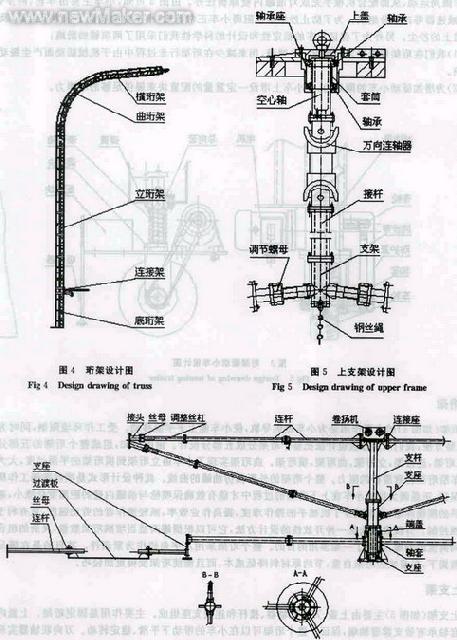
图6下支架设计图
6下支架
下支架是用来支撑珩架的,下支架在其轴套上连有三个连杆,彼此两两夹角为120°,它们另一端支靠在油罐内壁上,以阻止回转中心的偏移。为了防止连杆阻碍小车转动,在每一个连杆上小车过道处都设有一个高强度宽薄过渡板,以保证小车平稳通过过渡板。下支架的上部是两个对称的三角形支架,它们的另一端通过接头与珩架相连,由调节螺母来平衡系统,从而增强了整个珩架的刚性,提高了系统稳定性能。下支架的正上方用来安装卷扬机。
7卷扬机
卷扬机(如图7)主要由电动机通过变速箱带动两个相同卷筒组成。其转速不高,转动平稳、可靠,扭矩大的特点,在此恰好可用作机械手行走小车的牵引机构,通过其卷筒转动缠放钢丝绳来牵引小车在珩架导轨上行走,带动机械手的上下移动,以实现对机械手的准确定位。
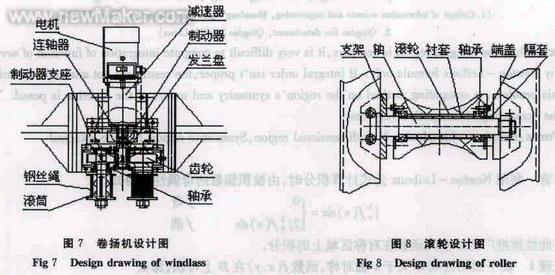
8滚轮
为了减小在提升或下放小车时钢丝绳与珩架的摩擦,我们设计了滚轮(如图8)。滚轮是在两个滚动轴承对滚轮轴的有效支撑下灵活转动的,从而大大减少了对钢丝绳的磨损破坏,提高了小车的安全系数。
9工作过程简析
(1)准备阶段:首先初始化控制电器参数,机械手行走小车停在珩架最下(或上)端;其次通过调整机械臂的各个关节,使得喷枪与喷面的角度和距离都处于最佳状态。
(2)作业阶段:珩架驱动小车按需要的速度带动珩架转动,机械手带动喷砂咀匀速上下摆动,同时开始喷砂。珩架驱动小车按设定速度一直转动180°,对称安装在两个机械手臂上的喷枪就会在油罐内壁上产生一个环形受喷带;同时卷扬机驱动机械手行走小车上升(或下降)一个受喷面带宽后停止;珩架拖动小车按设定速度反向转回起始点,依次类推,就完成了整个油罐的除锈工作。
10结束语
整个喷砂机器人结构简单、功能强大,若改变喷枪,提高防爆技术,即可以实现油罐内壁的油漆喷涂,改变珩架的外形,还可以实现油罐外避的除锈喷漆功能。在将来实际工作过程中,装配及运动部件动作误差的存在难免会造成机械手动作变形,同时由于罐内无法站人,因此若要保证良好的喷涂效果,就需要设置视觉监控及红外测距系统,实现人在罐外操纵机器人,调节补偿其意外动作误差,确保质量。
上一篇:直角坐标机器人的设计方法
下一篇:用于危险工作的机器人
-
浅析工业机器人与数控机床的融合应用
随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。 鉴于机器人研制以及与机床
2015-08-27 -
焊接机器人的主要技术指标

选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人
2015-06-15 -
导电滑环在机器人生产中的应用
现代,随着工业自动化的快速发展,工业机器人已经应用在各种场合,在这种背景下,工业机器人逐渐取代一些劳动强度大、作业环境恶劣的工作。专家研究认为,我国工业机器人的市场主要在汽车、摩托车、电器、工程机械、石油化工等行业,企业对技术进步的需求更加
2015-05-13 -
压力传感器在喷涂机器人上应用

喷涂机器人又叫喷漆机器,是可进行自动喷漆或喷涂其他涂料的工业机器人。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,机体多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动
2015-04-27



