

灵活的三指机械手
发布日期:2012-03-31 兰生客服中心 浏览:4332
对几何形状变化不定的物体,也就是说对形状和尺寸各不相同的物体的抓取,技术研究的重点放在一种灵活的低成本抓具(即IPA抓手)的研发上。
在许多技术领域,工业抓具大多结合操作任务来设计。除了大部分做成两爪式或三爪式的机械抓具之外,也经常采用真空抓具。人工手原则上有两种基本的结构方式,即一体化的结构和模块化的结构。
采用模块化结构时,手指运动所需要的所有执行机构都安装在手掌和指头上。这样,手可以适应任意的操纵机构或搬运运动机构。另一个特点是,由于部件的结构尺寸大,因而这种人工手大部分都明显大于人手。

仅用两个电动执行机构即可对变化中的物体几何形状做出反应
内置式结构的执行机构是集中安装在一个手指的运动部件里,也就是说安装在手掌外壳之外。力的传导大多采用牵引绳索或联动杠杆。这种手在尺寸和形状上往往与人手近似。不过,手的运动则只有采用相应的曲臂运动机构才能实现。
人工手拥有9个或更多的自由度,这需要人工手具有很复杂性的运动执行机构和很高的控制技术。标准抓手由于自由度数目小(大多数只有1个),因而对于物体变化不定的几体形状来说,其灵活性显得不足。人工手由于自由度数目大(9~22个之间)而显得非常复杂,因而造成零部件数目多。由此得出的结论是,根据目前的技术水平,使用这种人工手往往不够经济合算。
IPA人工手的大体方案是由三指平行抓具、三指定中心抓具以及二指抓具的组合构成的。这三种基本的抓持分别用在商业和工业用途上。另外,从经济效益上考虑,这种抓具仅装配两个电动驱动装置。
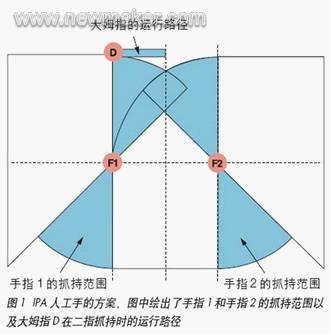
大姆指可以在两个位置上运行。在图1中描绘的位置上,大姆指正对面是手指1。二指抓具从这个位置上运行。当姆指处于中间位置时,三指平行抓具和三指定心抓具可以运行。在做抓持动作过程中,姆指是固定的,不向抓持的目标物运动。基本方案规定,“姆指调整”和“手指转动”的功能分别通过手指抓持运动之一进行耦合。

图2 人工手运动机构的配置情况:三种基本抓持:
a) 二指抓持, b) 三指平行抓持;c) 三指定中心抓持
IPA手的运动机构可以将二指抓具、三指平行抓具和三指定心抓具等三个基本抓具的手指进行配置(图2)。为了满足经济上合算以及减少技术复杂性,手的运动机构仅配有两台电动驱动装置。通过变速器实现传动,变速器可以使每个指头有两种动作:一个是手指在抓持力的方向上打开和关闭,另一个是手指围绕其垂直轴转动。IPA人工手的重要部分是变速器,是它把手指和驱动装置耦合起来。手指运动机构的各个零部件见图3。

锥齿轮传动机构将手指和电动机联接起来
两个手指当中的每个指头都过锥齿轮传动机构与电动机相连。锥形齿轮传动机构使每个手指均可围绕自己的垂直轴任意进行转动,并由此进行闭合运动。因此,每个指头的安装都是可以围绕垂直轴转动的。手指的闭合运动通过轴座上的挡块受到限制。举例来说,假如手指1碰到了其限位装置,则围绕其垂直轴做旋转运动。打开时做反时针方向的转动,闭合时做顺时针方向的转动。
上述的手指轴承安装可导致抓持物体时将抓持力转换成旋转运动。为了避免这一点,每个手指在抓持运动时必须加以锁定。在实际的总体系统方案中,这一点是通过离合器实现的,离合器是经过偏心轮进行控制的。偏心轮位于手指根部。它们在抓持运动的两个终端位置上操作离合器。
手指1的离合器可导致上述的锁定。手指2的离合器负责与大姆指随动装置的结合。该离合器一旦被操作,也就是说手指2位于后面的终端位置上,并通过手指1导致手指的转动,则大姆指移动到其相应的另一个位置上。为了继续提高手的灵活性,而且不必继续添加执行机构,可以采用一个自适应手指的运动机构。自适应手指的运动机构由若干关节组成,这些关节被安排成三角形,并且各有一根横撑。各个关节内装有转动弹簧,弹簧负责指头的回位。
根据传力运动机构的位置,指头向需要抓持的物体贴近,因而对一个固定的指头也产生更大数目的接触点。触点的增加又导致指头与物体之间的摩擦贴合,因而导致抓持得更加牢靠。自适应手指运动机构的参数有关节的数目、运动机构的长度以及与指头根部的距离。通过适当选择参数,可使运动机构对一个级别的物体达到优化。
控制装置的基础是单片PC,一台80X86兼容计算机。芯片一体化安装在一块板子上,板上装有驱动器和各种外围设备。这块板子的标志为Devi-Lan,装有一个以太网存储器,该存储器可以经过网络进行控制。所用的驱动装置是无刷直流驱动装置,它们可以通运动作控制器进行操作。若干终端开关以及一台用于手指围绕垂直轴转动的位置传感器采集人工手运动机构的系统状态。
指头的配置可以简单进行控制
控制装置的编程非常巧妙,它可以使用三种手指配置仅在几个指令的控制下从三指平行抓具的基本位置进入到别的抓持动作。这样就可以使用简单的指令对三种基本的抓持方式进行控制。而且,抓具的打开和闭合只需要一个指令。而且打开时还可以设想采用两种方式。
有一种可能性是力控操作。为此必须将力传感器至少内装于一个指头内。假如采用敏感的传感器外壳,这种传感器不仅可以提供力的数量大小,而且还可以提供位置的分辨,那么就可以进行极为灵敏的抓持。假如把力传感器内装于手指根部,则最终测量到的是转矩。如果不知道力的切入点,就不可能对作用于抓持目标物的力得出结论。
另一种可能性是位置控制操作。这种工作方式在实际的总体系统方案中已经得到应用。不过,使用这种方式需要知道物体的几何形状。这些数据可以利用图像处理系统求出。
研制工作的目的是,开发一种灵敏的低成本抓具。结果是研制出了一台仅采用2个电动执行机构而具有4个自由度的灵活的三指人工手。利用这种运动机构,可以对变化中的物体几何形状做出反应。结合使用分散的控制单元,可以顺利而简单地内装到机器人系统中。
用IPA人工手所做的试验证明,采用这种方案可以抓持几何形状变化不定的物体。演示机的可靠性可与工业抓具不相上下。研制的新产品仍具有必要的潜力,可以用于下列用途并可带来经济效益:
● 用于搬运技术,特别是在各行各业的加工设备上输送和抓取零部件。
● 用于商业中的自动配货。
● 用于服务机器人,比如用于移动式家用机器人取送东西的服务。
● 在工业环境中用作辅助系统(工人的第三只手)。
上一篇:激光焊接机器人系统
下一篇:机器人自动柔性搬运系统在重型汽车生产的应用
-
浅析工业机器人与数控机床的融合应用
随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。 鉴于机器人研制以及与机床
2015-08-27 -
焊接机器人的主要技术指标

选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人
2015-06-15 -
导电滑环在机器人生产中的应用
现代,随着工业自动化的快速发展,工业机器人已经应用在各种场合,在这种背景下,工业机器人逐渐取代一些劳动强度大、作业环境恶劣的工作。专家研究认为,我国工业机器人的市场主要在汽车、摩托车、电器、工程机械、石油化工等行业,企业对技术进步的需求更加
2015-05-13 -
压力传感器在喷涂机器人上应用

喷涂机器人又叫喷漆机器,是可进行自动喷漆或喷涂其他涂料的工业机器人。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,机体多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动
2015-04-27



