

工业管道的管外行走关节式机器人的研发应用
发布日期:2012-04-01 兰生客服中心 浏览:4304
引言
当管道输送高温、高压、剧毒等流体介质时,为了安全性,必须对管道工作情况进行定期检查或实时监控。管内机器人不适合完成该项任务,而管外机器人显示了明显的优越性能。
从上世纪70年代开始,国外学者进行了管外行走机器人研究,并已研制出多种管外行走机器人_lI3 J。之后西班牙学者利用Stewart—Cough并联机构研制出一种攀登机器人 J,它不仅能爬水平管,还能爬立管。美国Envision L 5l公司2000年设计推出的一些小型管外轴向行走机构,采用磁性轮结构。以及一种周向爬行器,它利用一条金属软带紧箍在管道上作为轨道,行走轮带动车体沿其上行走而驱动仪器作旋转运动。文献[6]提出采用一种基于挠形体摩擦传动的特殊的链传动实现管外周向运动。但管道上有各种障碍,如,T型和L型管道、并行管道和法兰等,因此要求管外机器人具有灵活跨越这些障碍的能力。针对这一要求,文中提出一种关节式管外机器人,它是关节式串联机器人在管道上的一种应用,并具有跨越这些越障能力。
下面着重介绍关节式机器人的运动学模型和跨越典型障碍时的运动学反解。
1 关节式管外机器人运动模型
设计的关节式管外机器人拓扑结构如图1所示,坐标系设置如图2所示。腕关节只是实现手指抓握管道,不参与确定手爪的位姿。因此,当手爪抓握管道时,腕关节可视为自由度为零,即与手臂固结。关节式管外机器人行走原理为:手爪A、B交替得抓紧管道并通过各关节的运动,实现各种复杂运动。翻转关节、回转关节和腕关节都是铰链,移动关节是移动副。当沿管道轴向移动时,回转关节和移动关节工作;当跨越法兰或T型和L型管道等障碍时,翻转关节也参加工作。实际上机器人跨越障碍就是对手爪的位姿进行轨迹规划,文中采用D—H方法描述手爪的位姿。
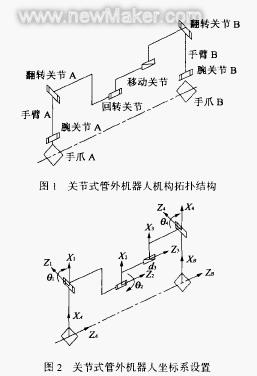
当手爪4抓握管道时,以手爪A为机器人的基础杆,在θ1=0时,基坐标系|0|与|1|重合(故图中未画出),同时建立手爪A的固定坐标系:OA-XaYaZa。
上一篇:用于工业管道内作业的细小机器人
下一篇:采用机器人控制车身喷涂质量
-
浅析工业机器人与数控机床的融合应用
随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。 鉴于机器人研制以及与机床
2015-08-27 -
焊接机器人的主要技术指标

选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人
2015-06-15 -
导电滑环在机器人生产中的应用
现代,随着工业自动化的快速发展,工业机器人已经应用在各种场合,在这种背景下,工业机器人逐渐取代一些劳动强度大、作业环境恶劣的工作。专家研究认为,我国工业机器人的市场主要在汽车、摩托车、电器、工程机械、石油化工等行业,企业对技术进步的需求更加
2015-05-13 -
压力传感器在喷涂机器人上应用

喷涂机器人又叫喷漆机器,是可进行自动喷漆或喷涂其他涂料的工业机器人。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,机体多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动
2015-04-27



