

ABB机器人编程与测试
发布日期:2012-06-07 兰生客服中心 浏览:19061
一、程序储存器(Programmemory)的组成:
应用程序(Program)
系统模块(Systemmodules)
机器人程序储存器中,只允许存在一个主程序;所有例行程序与数据无论存在于哪个模块,全部被系统共享;所有例行程序与数据除特殊定义外,名称必须是唯一的。

1、应用程序(Program)的组成:
·主模块(Mainmodule)
主程序(Mainroutine)
程序数据(Programdata)
例行程序(Routines)
·程序模块(Programmodules)
程序数据(Programdata)
例行程序(Routines)
2、系统模块(Systemmodules)的组成:
·系统数据(Systemdata)
·例行程序(Routines)
所有ABB机器人都自带两个系统模块,USER模块与BASE模块,根据机器人应用不同,有些机器人会配备相应应用的系统模块。建议不要对任何自动生成的系统模块进行修改。
二、编程窗口:

1、菜单键File:
1、 Open:打开一个现有文件。(程序.prg或模块.mod)
2、 New:新建一个程序。
3 、Saveprogram :存储更改后的现有程序。
4 、Saveprogramas:存储一个新程序。
5 、Print: 打印程序,现已经不使用。
6、 Preferences:定义用户化指令集。
7、 Checkprogram :检验程序,光标会提示错误。
8 、Close:在程序储存器中关闭程序。
9、 Savemodule :存储更改后的现有模块。(只在Module窗口中存在)
0、 Savemoduleas : 存储一个新模块。(只在Module窗口中存在)
2、菜单键Edit:
1、 Cut:剪切,可能会丢失指令或数据。
2 、Copy :复制。
3 、Paste :粘贴,将剪切或复制的指令或数据粘贴到相应位置。
4、 GotoTop:将光标移至顶端。
5、 GotoBottom :将光标移至底端。
6 、Mark :定义一块,涂黑部分。
7、 ChangeSelected :修改指令中数据,可直接将光标移至相应位置按回车键。
8 、Showvalue: 输入数据,可直接将光标移至相应数据按回车键。
9、 Modpos :修改机器人位置,功能键上有。
0、 Search:寻找指令,程序复杂时很有用。
3、菜单键IPL1与IPL2:
IPL1与IPL2为指令目录。
其中IPL2有Mostcommt1、Mostcommt2、Mostcommt3为用户化定义指令目录,可在菜单键File中Preference定义。
4、功能键:
Copy、Paste、Modpos在菜单键Edit中可以找到。
Test为编程窗口与测试窗口切换键。
三、指令:
1、基本运动指令:

MoveL:线性运动 (Linear)
MoveJ:关节轴运动 (Joint)
MoveC :圆周运动 (Circular)
p1:目标位置。(robtarget)
v100:运行速度mm/s。(speeddata)
z10:转弯区尺寸mm。(zonedata)
tool1:工具中心点TCP。(tooldata)
(1)速度选择:mm/s
·将光标移至速度数据处,按回车键,进入选择窗口,选择所需速度。
·机器人运行速度属于数据类型speeddata。
·常用运行速度在Base模块中已经定义。
·特殊速度可自行定义。
·max速度为v5000,Base模块中定义最大速度为v7000,最大速度机器人未必能达到。
(2)转弯区尺寸选择:mm
·将光标移至转弯区尺寸数据处,按回车键,进入选择窗口,选择所需转弯区尺寸。
·机器人转弯区尺寸属于数据类型zonedata。
·常用转弯区尺寸在Base模块中已经定义。
·特殊转弯区尺寸可自行定义。
·fine指机器人TCP达到目标点,并在目标点速度降为零,连续运行时,机器人动作有停顿。
·zone指机器人TCP不达到目标点,连续运行时,机器人动作圆滑、流畅。
·Base模块中已经定义的转弯区尺寸最小为z1,最大为z200。
·尽量使用较大的转弯区尺寸。
(3)参变量:
光标指在当前指令时,按功能键OptArg,可选择参变量。
·[\Conc](switch)
协作运动。机器人未移动至目标点,已经开始执行下一个指令。
·[ToPoint](robtarget)
在采用新指令时,目标点自动生成*。
·[\V](num)
定义速度mm/s。
·[\T](num)
定义时间s。通过时间决定速度。
·[\Z](num)
定义转弯区尺寸mm。
·[\Wobj](wobjdata)
采用工件系座标系统。

(4)函数Offs():

MoveLp1,v100,…
MoveLp2v100,…
MoveLp3,v100,…
MoveLp4,v100,…
MoveLp1,v100,…
·为了精确确定p1、p2、p3、p4点,可以使用函数Offs()。
·Offs(p1,x,y,z)代表一个离p1点X轴偏差量为x,Y轴偏差量为y,Z轴量为z的点。
·将光标移至目标点,按回车键,进入目标点选择窗口,在功能键上选择Func,采用切换选择所用函数Offs()。

 MoveLp1,v100,…
MoveLp1,v100,…
MoveLOffs(p1,100,0,0),v100,…
MoveLOffs(p1,100,-50,0),v100,…
MoveLOffs(p1,0,-50,0),,v100,…
MoveLp1,v100,…
2、转轴运动指令:
MoveAbsJ, jpos1, v100, z10, tool1
jpos1:目标位置。(jointtarget)
v100:运行速度mm/s。(speeddata)
z10:转弯区尺寸mm。(zonedata)
tool1:工具中心点TCP。(tooldata)
3、输入输出群指令:
·do指机器人输出信号。
·di指输入机器人信号。
·输入输出信号必须在系统参数中定义。
·输入输出信号有两种状态,1(High)为接通,0(Low)为断开。
(1)输出信号指令:
A、输出输出信号指令:set dol
do1:输出信号名。(signaldo)将一个输出信号赋值为1。
B、复位输出信号指令:Reset do1
do1:输出信号名。(signaldo)将一个输出信号赋值为0。
C、输出脉冲信号指令:ulseDO do1
do1:输出信号名。(signaldo)输出一个脉冲信号,脉冲长度为0.2s。
参变量:
·[\PLength](num) 脉冲长度,0.1s-32s。
(2)输入信号指令:
WaitDI di1, 1
di1:输入信号名。(signaldi)
1:状态。(dionum)
参变量:
·[\MaxTime](num)等待输入信号最长时间s。
·[\TimeFlag](bool)逻辑量,TRUE或FALSE。
如果只选用参变量[\MaxTime],等待超过最长时间后,机器人停止运行,并显示相应出错信息。如果同时选用参变量[\MaxTime]与参变量[\TimeFlag],等待超过最长时间后,无论是满足等待的状态,机器人将自动执行下一句指令。如果在最长等待时间内得到相应信号,将逻辑量置为FALSE,如果超过最长等待时间,逻辑量置为TRUE。
4、通信指令(人机对话):
(1)清屏指令:TPErase
(2)写屏指令:PWrite String
tring:显示的字符串。(string)在示教器显示屏上显示字符串数据,也可以用“……”形式直接定义字符串,每一个写屏指令最多显示80个字符。
(3)功能键读取指令:TPReadFK, Answer , Text , FK1 , FK2. FK3, FK4 , FK5
Answer:赋值数字变量。(num)
Text:显示屏显示的字符串。(string)
FK1:功能键1显示的字符串。(string)
FK2:功能键2显示的字符串。(string)
FK3:功能键3显示的字符串。(string)
FK4:功能键4显示的字符串。(string)
FK5:功能键5显示的字符串。(string)
在示教器显示屏上显示字符串数据,在功能键上显示相应字符串,选择按相应的功能键,机器人自动给数字变量赋于相应数值1-5。
5、程序流程指令:
(1)判断执行指令IF:
“Yes-part” 执行“Yes-part”指令。
ENDIF
ELSE 不符合
“Not-part” 执行“Not-part”指令。
“Yes-part2” 执行“Yes-part2”指令。
ELSE 不符合
“Not-part” 执行“Not-part”指令。
ENDIF
(2)循环执行指令WHILE:
WHILEreg1<5DO 循环至不符合条件reg1<5,
reg1:=reg1+1;(Incrreg1;) 才执行ENDWHILE后指令。ENDWHILE
循环指令WHILE运行时,机器人循环至不满足判断条件后,才跳出循环指令,执行ENDWHILE后运行指令。循环指令WHILE运行时,存在死循环,在编写相应机器人程序时必须注意。
6、程序运行停止指令:
(1)停止指令Stop:
机器人停止运行,软停止指令(Soft Stop),直接在下一句指令启动机器人。
(2)停止指令Exit:
机器人停止运行,并且复位整个运行程序,将程序运行指针移至主程序第一行。机器人程序必须从头运行。
(3)停止指令Break:
机器人立刻停止运行,有冲击,直接在下一句指令启动机器人。
7、计时指令:
(1)时钟复位指令:ClKReset Clock
Clock:机器人时钟名称。(clock)
(2)时钟启动指令:ClKStart Clock
Clock:机器人时钟名称。(clock)
(3)时钟停止指令:ClKStop Clock
Clock:机器人时钟名称。(clock)
8、速度控制指令:
VelSet , Override, Max
Override:机器人运行速率%。(num)
Max:机器人最大速度mm/s。(num)
每个机器人运动指令均有一个运行速度,在执行速度控制指令后,机器人实际运行速度为运动指令规定运行速度乘以机器人运行速率(Override),并且不超过机器人最大运行速度(Max)。
9、等待指令:
WaitTime , Time
Time:机器人等待时间s。(num)
等待指令只是让机器人程序运行停顿片刻。
10、赋值指令:
Data:= , Value
Data:被赋值的数据。(All)
Value:数据被赋予的值。(SameasData)
举例:
ABB:=FALSE;(bool)
ABB:=reg1+reg3;(num)
ABB:=“WELCOME”;(string)
Home:=p1;(robotarget)
tool1.tframe.trans.x:=tool1.tframe.trans.x+20;(tooldata)
11、负载定义指令:
GripLoad , Load
Load:机器人当前负载。(loaddata)
四、例行程序(Routine):

首先,机器人从进料运输带(Infeeder)抓取工件,放至机器(Machine)中加工,加工完成后,机器人再从机器中将工件取出,放至出料运输带上,完成一个循环。

1、建立新例行程序:
 --->菜单键View--->2Routine--->功能键New
--->菜单键View--->2Routine--->功能键New
·Name例行程序名称。
最长16个字符,第一位必须为字母。
·Type例行程序类型。共有3种类型。
ROC-普通例行程序
FUNC-函数例行程序
TRAP-中断例行程序
·InModule当前例行程序所属模块名称。
·Datatype数据类型,函数例行程序专用。
2、例行程序参数设置:
每个例行程序可以自带多个变量,即参数。建立一个新例行程序后或重定义例行程序(Dupl)后,显示屏会显示以上窗口。通过功能键New增加参数,使用切换键将光标移动至相应参数,进行修改和定义。
·Name参数名称。
光标指向参数名称时,功能键出现Text,用来更改参数名称。最长16个字符,第一位必须为字母。
·Datatype数据类型。
光标指向数据类型时,功能键出现Chang…,用来更改例行程序参数数据类型。
·Required必需性选择。
光标指向必需性选择时,功能键出现Yes与No选项,选择Yes,会出现确认符*。
·Alt分批输入参数选项。
使用此项功能,必须是非必需参数。光标指向分批输入参数选项时,功能键出现First与Tail选项。
First-开始使用的参数。
Tail-结尾使用的参数。
·Mode数据模式。
光标指向必需性选择时,功能键出现In与Inout选项。In-参数使用时,只能读取。Inout-参数使用时,可以读写。
五、机器人的测试:
1、检查程序语法:
 --->菜单键File--->7CheckProgram
--->菜单键File--->7CheckProgram
2、编程窗口(Test):
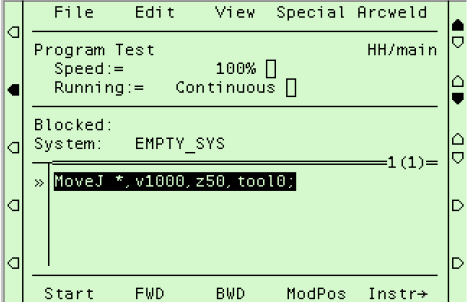
 --->菜单键View--->5Test
--->菜单键View--->5Test
(1)功能键:
tart:启动程序,机器人按程序连续运行。
FWD:机器人程序向前单步运行。
WD:机器人程序向后单步运行。
ModPos:修正机器人运行位置。
Instr:切换至指令窗口。
(2)运行模式选择:
在测试窗口按切换键,并且将光标移至运动模式选择(Running),此时,功能键显示Cont与Cycle选项。
·Cont连续运行模式,程序自动循环执行。
·Cycle单循环模式,程序运行完自动停止。
(3)运行速率选择:
在测试窗口按切换键,并且将光标移至运动速率选择(Speed),此时,功能键显示-%、+%、25%与100%选项,使用功能键确定运行速率。
·机器人实际运行速度为程序运动指令定义速度乘以相应百分比,最大不超过250mm/s。
·-%与+%在1%至5%之间将以1%递增或递减,-%与+%在5%至100%之间将以5%递增或递减。
·25%与100%是将机器人运行速率快捷的切换至25%与100%。
·运行速度调整可在程序运行时同步进行。
·在焊接程序中,运行速度选择只改变空行程速度,焊接速度不变。
(4)、程序运行指针(》):
·程序运行指针(简称PP)至关重要,它指示出一旦启动程序,程序将从哪里起执行。
·程序运行指针与光标必须指向同一行指令,机器人才能正常启动。
·使用菜单键Special可以更改程序运行指针位置,选择执行的指令。
1、MoveCursortoPP:将光标移至PP位置。
2、MovePPtoCursor:将PP移至光标位置。
3、MovePPtoMain将PP:移至主程序第一行。
4、MovePPtoRoutine:将PP移至相应例行程序。
3、删除指令:
将光标移至所要删除的指令行,按删除键,用功能键OK确认。
4、增加指令:
在测试窗口按功能键Instr->进入指令窗口,选择增加指令,被选择的指令将生成在光标所指指令行的下一行。如果光标在程序第一行,会出现一个提示窗口选择新指令生成在程序第一行(选择功能键Yes)或下一行(选择功能键No),然后用功能键OK确认。
5、修正工作点:
·将机器人移动至需要记录的工作点。
·将光标移动到需要修正的运动指令,按功能键ModPos修正工作点。
·注意此时操作窗口所选择的Tool与Wobj必须与运动指令所使用的一致。
6、停止:
按S-Stop键停止测试,尽量避免直接放开使能器( Enabling device )。
上一篇:ABB机器人输入输出信号
下一篇:ABB机器人自动生产
-
FANUC机器人示教
一、安全操作规程1、示教和手动机器人(1)请不要带者手套操作示教盘和操作盘。 (2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 (3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 (4)要预先考虑好避让机
2012-06-11 -
FANUC机器人的执行程序
一、程序中断和恢复程序中断由以下两种情况引起:■ 程序运行中遇到报警■ 操作人员停止程序运行 程序的中断状态有两种类型: 有意中断程序运行的方法:■ 按下TP或操作箱上的急停按钮,还有可以输入外部E-STOP信号。 输入UI[1] *
2012-06-11 -
FANUC机器人程序结构
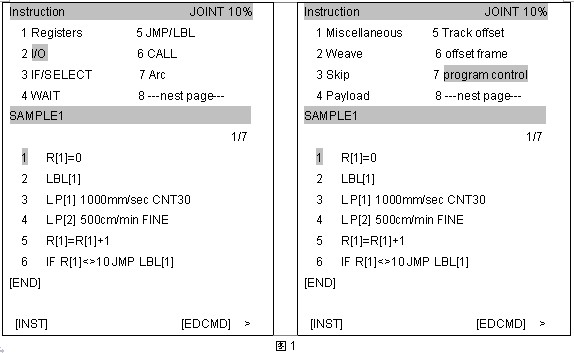
一、运动指令运动指令已经在编程一章中讲过,在这里我们重点讨论弧焊指令,寄存器指令,I/O指令,分支指令,等待指令,偏置指令,程序控制指令和其他常用的指令。这些指令都是通过程序编辑画面中的[INST]进入的(见图1) 注意:不同的软件,
2012-06-11 -
FANUC机器人FRAMES的设置
一、坐标系的分类(见表1) 表1 World Frame(通用坐标系) 是一个不可设置的缺省坐标系。其原点是用户坐标系和点动坐标系的参考位置,位于机器人内预先定义的位置。 ToolFrame(工具坐标
2012-06-11

