

ABB机器人自动生产
发布日期:2012-06-10 兰生客服中心 浏览:6476
一、启动程序:
1、将机器人操作模式选择器置于自动生产模式。

2、按功能键OK进入生产窗口。

(1)窗口标题(Windowtitle):
显示屏显示当前处在生产窗口,其内容不会变化,“ProductionInfo”。
(2)机器人速率(Robotvelo):
显示屏显示机器人当前运行速度速率标的,其内容不会变化,“Speed:=”。
(3)程序运行指针(Programpointer):
程序运行指针(简称PP)至关重要,它指示出一旦启动程序,程序将从哪里起执行。
如果程序需要重新初始化,必须将程序运行指针移至主程序第一行。
在当前窗口--->菜单键Edit--->2StartfromBeginning--->OK确认
(4)程序清单(Programlist):
显示屏显示机器人当前运行的程序清单,可读出即将运行的指令。
(5)程序名称(Programname):
显示屏显示机器人当前运行的程序名称。
(6)运行模式(Runningmode):
显示屏显示机器人当前运行模式。如果需要更改,利用导航键中的List键切换到窗口的上半部,再将光标移至运行模式,此时在功能键上出现“Continuous”与“Cycle”选项,选择相应运行模式。
Continuous 连续运行模式,当机器人执行完主程序最后一行后,自动再从第一行开始执
行。
Cycle 单循环运行模式,当机器人执行完主程序最后一行,自动停止。
(7)程序运行状态(Programstatus):
显示屏显示机器人当前运行状态。
topped 机器人待命状态。
Running 机器人正在运行程序。
(8)运行速率调整(Adjustedvelocity):

显示屏显示机器人当前运行速率,以百分比表示。机器人运行速度为程序定义的速度乘以相应的运行速率。如果需要更改,利用导航键中的List键切换到窗口的上半部,再将光标移至运行速率,此时功能键上出现“-%”、“+%”、“25%”与“100%”四个选项,通过功能键更改机器人运动速率,选择范围为1%-100%。
-% 降低机器人运行速率。5%以下,每次降低1%;5%以上,每次降低5%。
+% 增加机器人运行速率。5%以下,每次增加1%;5%以上,每次增加5%。
25% 运行速率直接切换至25%。
100% 运行速率直接切换至100%。
3、程序运行:

在生产窗口,功能键上显示“Start”、“FWD”与“BWD”三种选项。按相应功能键启动机器人。
|
tart |
连续执行程序。 |
|
FWD |
单步正向执行程序。 |
|
WD |
单步逆向执行程序。 |
4、停止程序运行:

按下停止键即停止程序的运行。
注意:正常情况下应该用这种方法停止机器人程序的运行,不要靠其他方式强行终止运行。
二、故障信息:
无论何时何种故障,一旦发生,机器人系统会立即弹出故障信息窗口。每个故障信息都带有故障代码,并提供简单故障原因,按下功能键OK,清除故障信息;按下功能键Check,还能看到系统提供的排除该错误的方法和建议。

|
Errorcodenumber |
故障代码。 |
|
Categoryoferror |
故障类別。 |
|
Reasonforerror |
故障发生的原因。 |
三、紧急制动及紧急制动的复位:
当急停键有效后,电机电源被迅速切断而停止程序运行。
排除引起急停的因素后,
在示教器上按OK键确认故障信息,复位急停键并重新按下MOTORSON即可恢复系统。
四、关机:
机器人所有的输出信号都会因关机而消失,夹具上的工件可能因此而掉下来。
首先停止程序的运行。
然后旋转主电源开关由1-0,切断380V电力。
建议:除非停电不要关机,这样能保证后备电池的寿命。
上一篇:ABB机器人编程与测试
下一篇:ABB机器人启动
-
FANUC机器人示教
一、安全操作规程1、示教和手动机器人(1)请不要带者手套操作示教盘和操作盘。 (2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 (3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 (4)要预先考虑好避让机
2012-06-11 -
FANUC机器人的执行程序
一、程序中断和恢复程序中断由以下两种情况引起:■ 程序运行中遇到报警■ 操作人员停止程序运行 程序的中断状态有两种类型: 有意中断程序运行的方法:■ 按下TP或操作箱上的急停按钮,还有可以输入外部E-STOP信号。 输入UI[1] *
2012-06-11 -
FANUC机器人程序结构
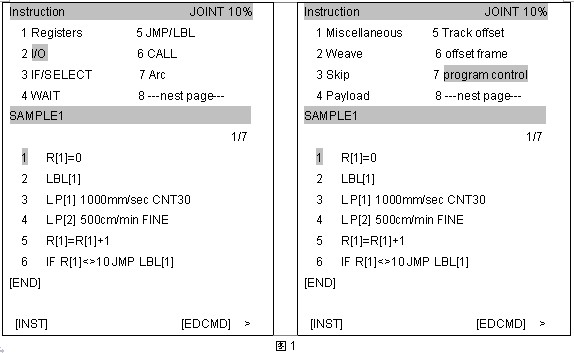
一、运动指令运动指令已经在编程一章中讲过,在这里我们重点讨论弧焊指令,寄存器指令,I/O指令,分支指令,等待指令,偏置指令,程序控制指令和其他常用的指令。这些指令都是通过程序编辑画面中的[INST]进入的(见图1) 注意:不同的软件,
2012-06-11 -
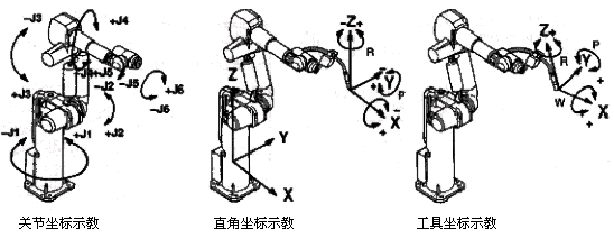
FANUC机器人FRAMES的设置
一、坐标系的分类(见表1) 表1 World Frame(通用坐标系) 是一个不可设置的缺省坐标系。其原点是用户坐标系和点动坐标系的参考位置,位于机器人内预先定义的位置。 ToolFrame(工具坐标
2012-06-11

