

ABB机器人启动
发布日期:2012-06-07 兰生客服中心 浏览:5939
1、合上电源
合上电源前,必须仔细检查,确认无人处于机器人周围的防护区内。
合上主电源开关
2、初始状态:
(1)热启动:
·机器人系统自动检查机器人硬件,当检查完成并且没有发现故障,系统将在示教器上显示以上界面信息。
·在自动模式下,生产窗口将在几秒钟后出现。
·正常启动后,通常保持上次电源关闭时相同的状态。
程序指针位置保持不变。
全部数字输出都保持断电以前的值或者置为系统参数中所指定的值。
正常情况下,开机后程序可以立刻运行。
·机器人程序被正常运行后,机器人会慢慢地回到编程路径(有偏差),然后在程序的路径上继续。
·运动设定和数据自动被设定到断电前相同的值。
·机器人将继续对中断作出反应。
·机器人在断电前激活的机械单元将在程序运行后自动被激活。
·弧焊和点焊过程自动被重置。但是,如果程序正好执行到更改焊接数据的指令时,新数据将在接缝上过早被激活。
(2)热启动限制:
·全部文件和串行通道都被关闭(可由用户程序控制)。
·全部模拟输出都被置为0,软伺服设定置被置为缺省值(可由用户程序控制)。
·焊缝跟踪不能被重置。
·不受机器人驱动的独立的轴不能被重置。
·如果在中断例行程序或错误处理程序正在执行时发生断电,程序路径不能被重置。
·如果在中央处理器(CPU)非常忙的时候发生断电,有可能由于系统无法正常关机而导致无法重新启动。在这种情况下机器人系统将显示故障信息。
(3)热启动故障:
·机器人启动时将对机器人功能进行广泛的检查。如果发生错误,会在示教器上以一般文本信息格式进行报告,并在机器人的事件记录中进行记录。
·并不是所有故障信息都会使机器人无法运行,但任何故障信息都表示机器人系统存在问题,会影响正常使用或丧失部分功能。
·欲了解详细信息,请参阅相关机器人手册。
上一篇:ABB机器人自动生产
下一篇:ABB机器人示教
-
FANUC机器人示教
一、安全操作规程1、示教和手动机器人(1)请不要带者手套操作示教盘和操作盘。 (2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 (3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 (4)要预先考虑好避让机
2012-06-11 -
FANUC机器人的执行程序
一、程序中断和恢复程序中断由以下两种情况引起:■ 程序运行中遇到报警■ 操作人员停止程序运行 程序的中断状态有两种类型: 有意中断程序运行的方法:■ 按下TP或操作箱上的急停按钮,还有可以输入外部E-STOP信号。 输入UI[1] *
2012-06-11 -
FANUC机器人程序结构
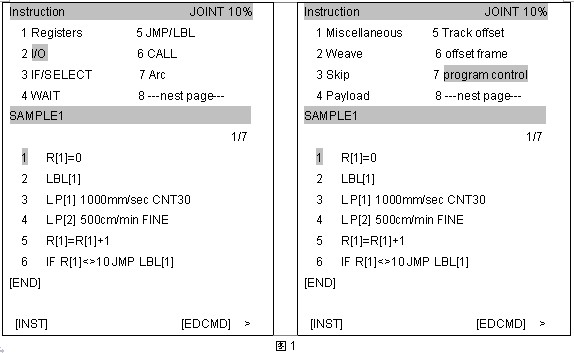
一、运动指令运动指令已经在编程一章中讲过,在这里我们重点讨论弧焊指令,寄存器指令,I/O指令,分支指令,等待指令,偏置指令,程序控制指令和其他常用的指令。这些指令都是通过程序编辑画面中的[INST]进入的(见图1) 注意:不同的软件,
2012-06-11 -
FANUC机器人FRAMES的设置
一、坐标系的分类(见表1) 表1 World Frame(通用坐标系) 是一个不可设置的缺省坐标系。其原点是用户坐标系和点动坐标系的参考位置,位于机器人内预先定义的位置。 ToolFrame(工具坐标
2012-06-11

