

菲尼克斯电气无线技术在总装涂胶机器人上的应用
发布日期:2012-03-26 兰生客服中心 浏览:5787
本文采用菲尼克斯电气无线模块和FIELD-LINE总线模块相结合的方案,对总装涂胶机器人的LOOP总线进行了更换,改造后不仅总线故障率为零,保证了后续备件的充足供应,还可节省每年更换备件的费用。
神龙汽车有限公司武汉一厂总装S1线涂胶机器人自投产以来,一直使用菲尼克斯电气的LOOP总线,该总线产品自2005年就已经停产,无法采购,库存备件也已经为零,一旦出现故障就面临停线的风险。针对机器人的工作特点,我们决定采用无线模块和FIELD-LINE总线模块相结合的方案,对机器人的总线进行更换,该项目由总装维修在高温假期间自改完成。
改造目标
此次改造的目的是淘汰老化已停产的LOOP总线模块,将其全部更换为菲尼克斯电气目前的主流产品。S1线的ABB涂胶机器人外围共有15个LOOP总线模块,其中有6个安装在机器人端拾器上,其余的9个分别安装在前、后风窗和涂胶泵站上;根据这个特点,我们的改造方案是将前风窗、后风窗和涂胶泵站上的9个LOOP总线模块更换为FIELD-LINE总线模块,将机器人端拾器上的6个LOOP总线模块更换为无线模块。图1是改造之前机器人总线的CMD程序截图,可以看出从"4.17模块"到"4.31模块"一共15个模块都是使用的LOOP总线,而从"4.0模块"到"4.16模块"使用的都是菲尼克斯电气的IN-LINE总线(该总线模块属于通用型,没有停产的风险)。
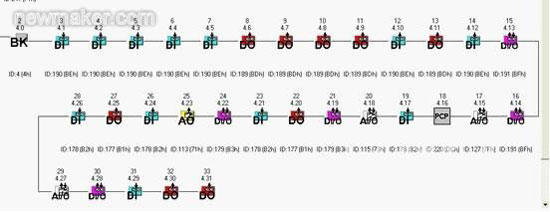
图1 改造之前的机器人总线CMD组态
方法和难点
先将机器人程序、PLC程序和CMD程序全部备份,再将前风窗、后风窗、机器人端拾器和胶站上的总线模块做好标记后拆除。
拆除旧模块后,按照之前设计的CMD组态来固定新模块,图2所示为新CMD组态,其中"4.0模块"到"4.16模块"没有更换,取消了原有的"4.17"到"4.31模块",改成了3个站点,分别是前风窗、后风窗和胶站(机器人端拾器使用的是无线模块,受控于"7.2"和"7.6"这两个无线基站模块,并不单独组成一个站点)。

图2 改造之后的机器人总线新CMD组态
安装完模块后,就开始进行电源接线。在原有的LOOP总线模式下,所有的模块被电源线串成一个环形(以机器人为例,LOOP环的电源线从电柜中的LOOP总线分支模块出来,经过前风窗-机器人端拾器-后风窗-胶站,最后再回到电柜中的LOOP总线分支模块),这样做的最大问题是当这个LOOP环断开时(比如电缆断路),很难立即判断出到底是哪一段出现断点(可能是电柜到前风窗,或者前风窗到机器人端拾器,又或者是机器人端拾器到后风窗,还有可能是后风窗到胶站,或是胶站到电柜),就像串联电路一样,很难判断故障的根源。在这次改造中,我们决定摒弃这种连接方式,而采用并联电路的方式,即以电柜为中心,同时分出四路电源,分别给前风窗、后风窗、胶站和机器人端拾器上的总线模块供电,四路电源互不干涉。这样做的好处是,如果某一个站点断电,可以很容易查到是哪一路电源线的问题。
完成了电源接线并通电测试后,就开始了最为繁琐的信号接线和对点工作。在前风窗和后风窗站点上各有一个模拟量输入模块,作用是将两个位移传感器发出的0~10V信号转化反应到程序中,在触摸屏上显示出来。完成接线后,手动测试时我们发现,实际测量值和以前有很大的不同,而且前后风窗都是如此,这样基本可以排除模块本身的故障。经过仔细比较,发现LOOP总线模块和FIELD-LINE总线模块的针脚定义不完全相同,这导致了测量值出现偏差,将位移传感器的进线更改为适应新模块的接法后,再进行测量,测量值和以前完全一样。
技术原理
1.无线总线的优点
(1)由于涂胶机器人工作方式的限制,总线模块必须固定在机器人的端拾器上,随机器人一起运动,原来采用LOOP总线方式时,连接总线模块的既有电源电缆,又有信号电缆,在护管中互相摩擦,几乎每隔3个月就要进行整体更换;采用了无线技术后,护管中电缆的数量由原来的3根减少到1根,取消了信号电缆,实现了我们对设备自由移动和无损耗传输介质的需求。
(2)机器人岛中的现场情况、障碍以及狭小的空间决定了无线传输的可靠性、实用性要远远超过传统的复杂布线。采用了无线技术以后,信号传输的可靠性、操作性、优异的诊断功能以及快速简单的排障功能都得到了很好的验证,在安装调试过程中,无线模块也能够快速地接入已有控制系统。
2.无线总线的传输
(1)INTERBUS无线总线是靠蓝牙传输的,最多可联7个从站,对带宽要求较低,传输的是小数据包,可以进行快速和稳定的传输。由于采用的是FHSS(跳频扩频)技术和免费频段,所以可以与WLAN和手机蓝牙等设备并行,不用担心干扰源问题。
(2)无线传输从根本上避免了机器人工作方式易产生的抖动、干扰和丢失等弊端,特别是解决了信号传输量限制的根本问题,实现了系统信息的全采集,提高了可靠性和稳定性,也给操作和维护带来了方便。
(3)同时提供了系统无线接入点,解决了机器人端拾器与地面总线连接的问题。在对总线系统进行调试、参数变更、故障检查和维护时无需采用以往空中操作或随行方式,可以在无线系统覆盖区域内的任意位置通过无线客户端(如笔记本电脑)对系统全部被控点进行操作和监控。
(4)无线传输提高了系统的扩展性,将来要想增加I/O点,控制系统只需增加一套输入输出模块和一个无线基站即可。
(5)无线传输系统保证了无机械摩损,无需参考点,绝对位置测量,实时检测,最大限度地实现了机器人的智能化。
3.程序处理
(1)在改造过程中最重要的是程序的编辑,就是在CMD组态中定义I/O点,将其与PLC程序中的I/O点一一对应起来。对点有两种方法,第一种方法是在CMD组态的过程数据字中仅仅定义一个字(例如E48),这样在PLC程序中将会自动生成I48.0~I48.7这8个输入点,这样做的话,在CMD组态时工作量很小,但在PLC程序中将面临大量的程序更改,很容易出错;第二种方法是在CMD组态时就一个一个定义模块上的过程数据字(见图3),这样做的话,PLC程序部分就完全不需要做任何更改,本文采用了第二种方法。
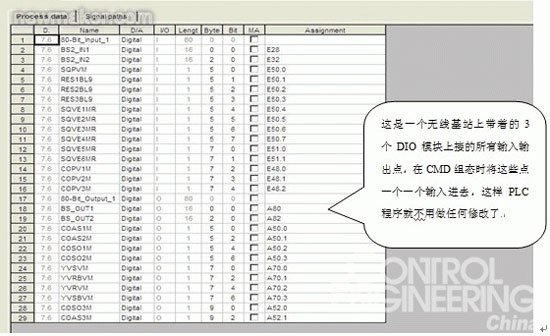
图3 在CMD组态时一一定义模块上的过程数据字
(2)无线模块和无线基站的对地址方法:首先确认一个无线基站需要带几个无线模块,是什么类型的,然后将无线基站上的Process data width settings(过程数据字长度)拨至几(具体算法是:无线基站本身占2个字,DIO模块每个占1个字,AIO模块每个占3个字,比如一个无线基站带了3个DIO模块则过程数据字长度为2+1+1+1=5;一个无线基站带了3个AIO模块则过程数据字长度为2+3+3+3=11),然后再将Device number settings(设备数量设置)拨至1,表示现在对第一个无线模块,再将第一个无线模块上的ID-PLUG插头插在无线基站的ID-PLUG上,当下面的指示灯由橙色变成绿色,就表示该无线模块的地址对完了。
结语
将菲尼克斯电气无线总线模块应用在涂胶机器人以及西门子S7型PLC中,这对我们来说是第一次尝试,应用在涂胶机器人中能够充分地发挥它的优势,性价比很高。这在国内无线网络用在涂胶机器人系统中,特别是机器人可以自动抓取、涂胶和安装项目中是一个全新的尝试。我们使用半年以来,不仅总线故障率为零,保证了后续备件的充足供应,每年还可节省更换备件费用超过5万元。
-
浅析工业机器人与数控机床的融合应用
随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。 鉴于机器人研制以及与机床
2015-08-27 -
焊接机器人的主要技术指标

选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人
2015-06-15 -
导电滑环在机器人生产中的应用
现代,随着工业自动化的快速发展,工业机器人已经应用在各种场合,在这种背景下,工业机器人逐渐取代一些劳动强度大、作业环境恶劣的工作。专家研究认为,我国工业机器人的市场主要在汽车、摩托车、电器、工程机械、石油化工等行业,企业对技术进步的需求更加
2015-05-13 -
压力传感器在喷涂机器人上应用

喷涂机器人又叫喷漆机器,是可进行自动喷漆或喷涂其他涂料的工业机器人。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,机体多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动
2015-04-27



