

三维动态模拟在机器人设计中的应用
发布日期:2012-04-01 兰生客服中心 浏览:3929
一、引言
工业机器人是近30年来在自动操作机基础上发展起来的一种能模仿人的某些动作和控制功能,并按照可变的预定程序、轨迹及其他要求操纵工具实现多种操作的自动化机械系统。它综合了精密机械、控制传感器和自动控制技术等领域的最新成果,在工厂自动化和柔性生产系统中起着关键的作用,并已广泛应用到工农业生产、航天航空和军事技术等各个领域。
工业机器人的大力发展使得工业机器人的设计成为一个突出的课题。由于工业机器人的研究是作为一个系统进行的,必须从总体出发研究其系统内部各组成部分和外部环境与系统之间的相互关系。在通常情况下设计的第一步是要对工业机器人的相关技术参数进行可行性分析,这些技术参数主要包括:自由度、工作空间、额定负载、运动速度、分辨率、位姿和轨迹的准确性和重复精度等。在设计过程需建立相关的机构模型,通过计算机器人的运动学和动力学方程的正解或逆解来了解这些基本参数的情况,而这需要花费设计人员大量的时间,特别是在对新产品的开发上,找到一种简洁、直观、快速的分析方式解决这一问题是当务之急。
随着计算机技术的普及与不断发展,特别是三维绘图软件出现,使CAD技术又跃上了一个台阶。用三维绘图软件对设计参数进行三维动态模拟,对工业机器人的设计应该是一种高效、直接的方式,这种方式直观、形象,更重要的是降低了企业新产品的设计周期和成本,是一种行之有效的办法。
本文以三维绘图软件中的INVENTOR软件作为应用的对象,介绍INVENTOR软件进行机器人设计的三维动态模拟的应用方法。
二、运用INVENTOR软件对机器人的设计进行三维动态模拟的可行性
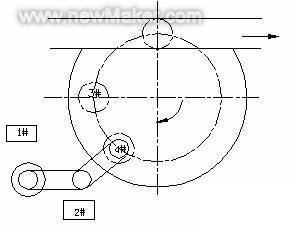
在机器人的设计中,各技术参数的机器人位姿、轨迹和工作空间的分析是首要的、必须的。要满足工作需求,机器人工作状态应该满足某种条件。如下图在装配生产线中要设计一机器人来完成对物料的装配,要求机器人完成对1#和2#两个位置物料的装配。
在这里要模拟满足工作需要的机器人必须是在三维空间中运动的,并且要把机器人完成的动作进行必要的分解,被分解的动作是运动的两种基本形式:移动或旋转。使用的相关软件能三维动态地模拟机器人的运动过程,从而得到相应的位姿、轨迹和工作空间。在模拟的过程中,要求该软件可以提供参数化的设计,在对机器人的相关参数进行修改后,可随时观察机器人的运动状态。
INVENTOR软件具备上述的几个条件,它具有以下特点。
首先它是三维绘图软件,可根据草图的绘制得到基于特征造型的各种零件;在构造出的零件以后,可以创建装配图,形成相关的装配体,这一组装的机器人可近似地表达其大致的立体结构。其次,INVENTOR软件可实现装配体的动态模拟,这主要依赖于它的表达视图的功能,在表达视图中,可对机器人运动部件进行模拟,基本的运动形式是移动和旋转,在此基础上由这两种基本的运动形式可形成更多的运动。这种表达视图所形成的动画以AVI文件形式被保存下来,以备修改。此外,INVENTOR软件还是一种基于参数化的、具有自适应功能的软件,它可对设计的各参数进行修改,当零件的参数修改后,其相应的装配体模型、工程图模型已将随之改变。最后,INVENTOR软件可根据三维模型自动形成二维工程图纸,在二维工程图纸中,根据设计者需要选择表达方案,快速标注相关的尺寸。
INVENTOR软件的这些条件可以帮助我们完成机器人运动的三维动态模拟,提高设计的效率和质量。下面就上例介绍以下INVENTOR软件三维动态模拟的具体方法。
三、运用INVENTOR软件对机器人进行三维动态模拟的方法
为实现上述工作任务,我们选择基于关节型的SCARA机器人,完成将物料从1#到3#,从2#到4#的装配。我们首先根据SCARA机器人的构造创建机器人的各主要零件,主要通过绘制草图构造机器人各主要零件的三维模型。完成各零件后,要新建装配体,选择合适的装配约束将各零件组装起来。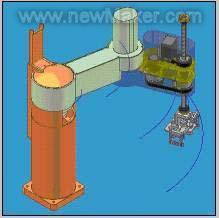
完成装配体的装配后,新建表达视图。将装配体文件调入,对装配体的运动部件进行运动设置。具体方法如下:点击调整零部件位置按钮,选择运动的零部件,在方向这一选项中选择坐标系OXYZ,将坐标系移动到所选的零部件的适当位置上,在平移选项上选择移动或旋转,根据在零部件上所选的坐标系方向,选择X轴或Y轴或Z轴上的运动,平移运动可根据坐标轴的方向输入相关移动距离的代数值,旋转运动要选择相应的旋转的角度,如果整周旋转,应选360°。如果是复合运动,可同时选择相应的多个坐标系方向。如沿Z轴的螺旋运动,应选择零部件,设好Z轴方向,在移动选项设距离,在旋动选项设角度。如图所示为SCARA机器人的运动设置。
在设置好运动参数后,点击动画按钮,在参数选项设置时间的间隔以及重复的次数,在动画的顺序中设置机器人各零部件运动的次序,可通过上移和下移调节各零部件运动的顺序,通过组合和分解调整复合运动的组成。如沿Z轴的螺旋运动,将Z轴的平移运动和Z轴的旋动运动组合起来。
设好所有参数后,可在表达视图浏览器中观察到相应的设置,点击录制动画按钮,将其保存为AVI文件。这样通过对SCARA机器人的三维模拟运动,从而观察和检验设计参数的正确与否。
进行参数化设计时,要在相关零部件的立体图中,把设计参数设为变量。改变设计变量后,相关的零部件、表达视图及动画文件都会随之变化,这样就可以观察出该参数对机构运动的影响,从而调整设计参数改进机构。
四、结束语
综上所述,用INVENTOR软件进行机器人的三维动态模拟对设计是很有帮助的,它使设计更加直观、形象,能够提高机器人设计的质量。
上一篇:直角坐标机器人在奥运会项目中的应用
下一篇:用机器人在木材加工中的送料
-
浅析工业机器人与数控机床的融合应用
随着我国装备制造业转型升级,在市场需求和技术进步双重作用下,近几年来工业机器人与数控机床集成应用发展很快,应用的形式不断扩展,对当前机床智能化潮流带来新的促动,对我国机床工具行业的转型升级也必将起到有益的推动作用。 鉴于机器人研制以及与机床
2015-08-27 -
焊接机器人的主要技术指标

选择和购买焊接机器人时,全面和确切地了解其性能指标十分重要。使用机器人时,掌握其主要技术指标更是正确使用的前提。各厂家在其机器人产品说明书上所列的技术指标往往比较简单,有些性能指标要根据实用的需要在谈判和考察中深入了解。 焊接机器人
2015-06-15 -
导电滑环在机器人生产中的应用
现代,随着工业自动化的快速发展,工业机器人已经应用在各种场合,在这种背景下,工业机器人逐渐取代一些劳动强度大、作业环境恶劣的工作。专家研究认为,我国工业机器人的市场主要在汽车、摩托车、电器、工程机械、石油化工等行业,企业对技术进步的需求更加
2015-05-13 -
压力传感器在喷涂机器人上应用

喷涂机器人又叫喷漆机器,是可进行自动喷漆或喷涂其他涂料的工业机器人。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,机体多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动
2015-04-27



