

为什么要采用混合型机器人
发布日期:2012-03-21 兰生客服中心 浏览:12853
直角坐标机器人以行程大,负载能力强,精度高,组合方便,性价比非常高,易编程,易维护等优点,用于各种自动化生产线中完成码垛搬运、上下料、供料、装配、检测、焊接和涂胶等任务,而深受各个行业专家和操作者的称赞。但在完成一些需要进入小空间的作业时,不由关节机器人灵活。如果能把直角坐标机器人和关节机器人二者的部分功能及特点结合起来,混合机器人集成就能保持直角坐标机器人优点的同时,扩张其应用领域及应用灵活性。
混合机器人
如图1所示六自由度混合机器人由三个直线运动轴,两个转动轴和一个摆动轴组成。图1中六自由度混合型机器人的三个直线运动轴是悬臂型直角坐标机器人。在上下运动的Z轴下端带动一个旋转轴,而旋转轴带动一个摆动轴,摆动轴末端再带动一个旋转轴。最末端的旋转轴带动手爪。由于两个旋转轴和摆动轴其实就是关节机器人的末端三个运动轴,所以六轴混合机器人就是三轴直角坐标机器人加上关节机器人的三个最末端运动轴组合而成。 根据实际需要,混合型机器人的直线运动轴也可以是二维的XY轴结构或XZ轴结构,也可以是龙门式结构。其各个直线运动轴的行程及承载能力可以按要求去做。
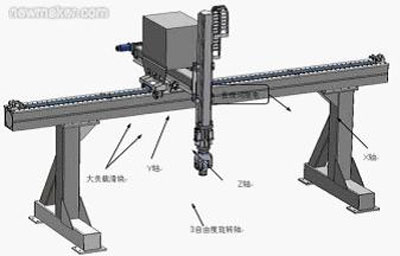

图1是一个典型的3D直角坐标机器人,它由X轴,Y轴,Z轴及驱动电机组成。此外一个完整的机器人系统还需要控制系统和手抓
上一篇:直角坐标与关节机器人的不同应用场合
下一篇:混合机器人具有以下特点
-
机床上下料机器人集成中机器人本体的选用
目前,机床上下料机器人系统集成广泛采用日本FANUC法那科的LR Mate 200iC系列机器人本体,客户定制的数控车床、加工中心等机床上下料自动化的项目中,FANUC机器人都有出色的表现,集高效生产、稳定运行、节约空间等优势于一体,获得了
2015-03-23 -
机床上下料机器人自动化改造系统设计原则
企业对现有的数控机床进行自动化改造,一般是采用工业机器人改变机床在加工过程中的工件上下料方式,即采用工业机器人来替代人工和专机,完成工件装卸、工作翻转、工序转换,不用人或少用人,实现机械零部件加工单元和生产线,能实现24小时的大批量、自动化
2014-08-29 -
上下料机器人辅助柔性生产
在切削加工中,过程自动化不仅与机床本身有关,而且也与连接机床的前后生产装置有关。工业机器人能够适合所有的操作工序,能解决诸如传送、质量检验、剔除有缺陷的工件、机床上下料、更换刀具、实际的加工操作、清洗和工件堆垛等任务。 现代工业机器人是
2012-04-06 -
机器人让汽车压铸件加工实现了自动化
重庆长安铃木汽车公司的压铸项目采用的新一代机器人,可全面提高生产柔性、生产效率和再现性,还能大幅缩短操作工时。 作为一家专业开发广泛应用于各类材料的成形、锻造和压铸解决方案的公司,米勒万家顿在过去的20年里一直与中国企业保持着良好的业务
2012-04-01



