产品简介
一、产品型号:
| MOTOMAN-VS、MS、ES系列 | 型号 | ||||
| 名称 | MOTOMAN-VS50 | MOTOMAN-MS80 | MOTOMAN-MS120 | MOTOMAN-ES165D | |
| 形式 | YR-VS00050-A00 | YR-MS00080-AOO | YR-MS00120-A00 | YR-ES0165D-AOO | |
| 构造 | 垂直多关节型(7自由度) | 垂直多关节型(6自由度) | 垂直多关节型(6自由度) | 垂直多关节型(6自由度) | |
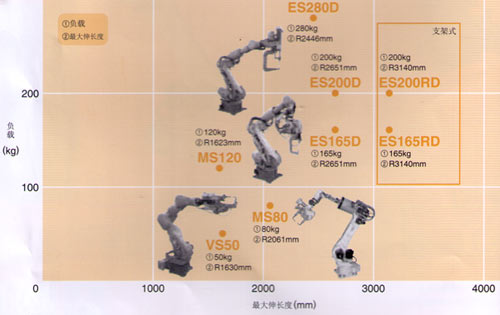
| 载荷 | 50kg | 80kg | 120kg | 165kg | |
| 重复定位精确度*1 | +0.1mm | +0.07mm | +0.2mm | +0.2mm | |
| 动作范围 | S轴(旋转) | +180º | +180º | +150º | +180º |
| L轴(下臂) | +125º~-60º | +120º~-60º | +50º~-60º | +75º~-60º | |
| E轴(肘) | +170º | ||||
| U轴(上臂) | +215º~-35º | +90º~-170º | +72º~-105º | +230º~-142.5º | |
| R轴(手腕旋转) | +170º | +360º | +360º | +360º | |
| B轴(手腕摆动) | +125º | +125º | +130º | +130º | |
| T轴(手腕回转) | +180º | +360º | +360º | +360º | |
| 最大速度 | S轴(旋转) | 2.97rad/s,170º/s | 2.97rad/s,170º/s | 2.27rad/s,130º/s | 1.92rad/s,110º/s |
| L轴(下臂) | 2.27rad/s,130º/s | 2.44rad/s,140º/s | 1.92rad/s,110º/s | 1.92rad/s,110º/s | |
| E轴(肘) | 2.27rad/s,130º/s | ||||
| U轴(下臂) | 2.27rad/s,130º/s | 2.79rad/s,160º/s | 2.27rad/s,130º/s | 1.92rad/s,110º/s | |
| R轴(手腕旋转) | 2.27rad/s,130º/s | 4.01rad/s,230º/s | 3.75rad/s,215º/s | 3.05rad/s,175º/s | |
| B轴(手腕摆动) | 2.27rad/s,130º/s | 4.01rad/s,230º/s | 3.14rad/s,180º/s | 2.62rad/s,150º/s | |
| T轴(手腕回转) | 3.49rad/s,200º/s | 6.11rad/s,350º/s | 5.24rad/s,300º/s | 4.19rad/s,240º/s | |
| 容许力矩 | R轴(手腕旋转) | 377N.m | 392N.m | 588N.m | 921N.m |
| B轴(手腕摆动) | 377N.m | 392N.m | 588N.m | 921N.m | |
| T轴(手腕回转) | 147N.m | 196N.m | 392N.m | 490N.m | |
| 容许惯性力矩(GD2/4) | R轴(手腕旋转) | 29.6kg.m2 | 28kg.m2 | 35kg.m2 | 85kg.m2 |
| B轴(手腕摆动) | 29.6kg.m2 | 28kg.m2 | 35kg.m2 | 85kg.m2 | |
| T轴(手腕回转) | 12.5kg.m2 | 11kg.m2 | 14.5kg.m2 | 45kg.m2 | |
| 本体重量 | 640kg | 550kg | 950kg | 1100kg | |
| 安装环境 | 温度 | 0~+45℃ | |||
| 温度 | 20~80%RH(无结露) | ||||
| 振荡 | 4.9m/s2以下 | ||||
| 其他 | ·不可有引火性及腐性气体,液体。 ·不可涉及水,油,粉等。·不可靠近电磁气源头 | ||||
| 电源容量*2 | 5.0kVA | 4.0kVA | 7.5kVA | 5.0kVA | |
| MOTOMAN-VS、MS、ES系列 | 型号 | ||||
| 名称 | MOTOMAN-ES200D | MOTOMAN-ES165RD | MOTOMAN-ES200RD | MOTOMAN-ES280D | |
| 形式 | YR-ES0200D-AOO | YR-ES165RD-A00 | YR-ES200RD-AOO | YR-ES280D-A00 | |
| 构造 | 垂直多关节型(6自由度) | 垂直多关节型(6自由度) | 垂直多关节型(6自由度) | 垂直多关节型(6自由度) | |
| 载荷 | 200kg | 165kg | 200kg | 280kg | |
| 重复定位精确度*1 | +0.2mm | +0.2mm | +0.2mm | +0.2mm | |
| 动作范围 | S轴(旋转) | +180º | +180º | +180º | +180º |
| L轴(下臂) | +76º~-60º | +80º~-130º | +80º~-130º | +76º~-60º | |
| U轴(上臂) | +230º~-142.5º | +208º~-112º | +208º~-107º | +230º~-142.5º | |
| R轴(手腕旋转) | +360º | +360º | +360º | +360º | |
| B轴(手腕摆动) | +125º | +130º | +125º | +125º | |
| T轴(手腕回转) | +360º | +360º | +360º | +360º | |
| 最大速度 | S轴(旋转) | 1.67rad/s,95º/s | 1.83rad/s,105º/s | 1.57rad/s,90º/s | 1.57rad/s,90º/s |
| L轴(下臂) | 1.58rad/s,90º/s | 1.83rad/s,105º/s | 1.48rad/s,85º/s | 1.39rad/s,80º/s | |
| U轴(下臂) | 1.67rad/s,95º/s | 1.83rad/s,105º/s | 1.48rad/s,85º/s | 1.57rad/s,90º/s | |
| R轴(手腕旋转) | 2.11rad/s,120º/s | 3.05rad/s,175º/s | 2.11rad/s,120º/s | 2.01rad/s,115º/s | |
| B轴(手腕摆动) | 2.11rad/s,120º/s | 2.26rad/s,150º/s | 2.11rad/s,120º/s | 1.92rad/s,110º/s | |
| T轴(手腕回转) | 3.32rad/s,190º/s | 4.19rad/s,240º/s | 3.32rad/s,190º/s | 3.32rad/s,190º/s | |
| 容许力矩 | R轴(手腕旋转) | 1344N.m | 921N.m | 1344N.m | 1333N.m |
| B轴(手腕摆动) | 1344N.m | 921N.m | 1344N.m | 1333N.m | |
| T轴(手腕回转) | 715N.m | 490N.m | 715N.m | 706N.m | |
| 容许惯性力矩(GD2/4) | R轴(手腕旋转) | 143kg.m2 | 85kg.m2 | 143kg.m2 | 142kg.m2 |
| B轴(手腕摆动) | 143kg.m2 | 85kg.m2 | 143kg.m2 | 142kg.m2 | |
| T轴(手腕回转) | 80kg.m2 | 45kg.m2 | 80kg.m2 | 79kg.m2 | |
| 本体重量 | 1130kg | 1540kg | 1570kg | 1120kg | |
| 安装环境 | 温度 | 0~+45℃ | |||
| 温度 | 20~80%RH(无结露) | ||||
| 振荡 | 4.9m/s2以下 | ||||
| 其他 | ·不可有引火性及腐性气体,液体。 ·不可涉及水,油,粉等。·不可靠近电磁气源头 | ||||
| 电源容量*2 | 5.0kVA | 5.0kVA | 5.0kVA | 10kVA | |