

桁架式机器人组成
发布日期:2012-12-18 兰生客服中心 浏览:10853
桁架式机器人由多维直线导轨搭建而成。直线导轨由精制铝型材、齿型带、直线滑动导轨和伺服电机等组成。作为运动框架和载体的精制铝型材其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线度。采用轴承光杠和直线滑动导轨作为运动导轨。运动传动机构 采用齿型带,齿条或滚珠丝杠。
桁架式机器人的空间运动是用三个相互垂直的直线运动来实现的、。由于直线运动易于实现全闭环的位置控制,所以,桁架式机器人有可能达到很高的位置精度(μm级)。但是,这种桁架式机器人的运动空间相对机器人的结构尺寸来讲,是比较小的。因此,为了实现一定的运动空间,桁架式机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。
桁架式机器人的工作空间为一空间长方体。
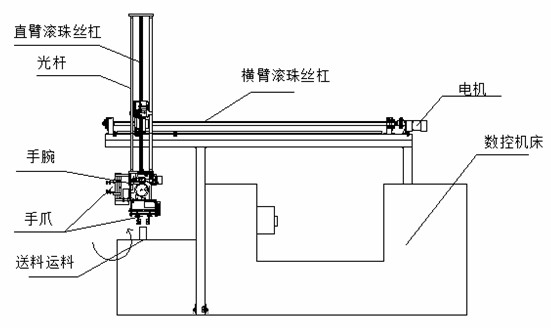
桁架式机器人机械手主要由3个大部件和4个电机组成:(1)手部,采用丝杆螺母结构,通过电机带动实现手抓的张合。(2) 腕部,采用一个步进电机带动蜗轮蜗杆实现手部回转90°~180°(3)臂部,采用滚珠丝杠,电机带动丝杆使螺母在横臂上移动来实现手臂平动,带动丝杆螺母使丝杆在直臂上移动实现手臂升降。
下一篇:桁架式机器人直线驱动系统
返回列表-
桁架式机器人应用
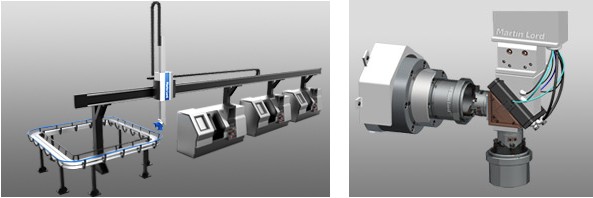
兰生公司的战略合作伙伴英国马丁路德机器人公司,提供的龙门式(桁架式)机器人为数控车床、立式加工中心机、卧式加工中心机、数控立式车床、数控磨床、数控磨齿机、数控焊接、 数控切割等设备的零件加工提供了自动化解决方案,其高可靠性、高速度、高精度的
2012-12-18 -
桁架式机床上下料机器人集成应用的其他技术
兰生工业自动化科技有限公司的桁架式机床上下料机器人集成,与马丁路德、机器人制造商共同合作。针对客户不同的需求,在桁架式机床上下料机器人自动化集成还应用了其他的相关技术。 1、润滑技术 机器人往往都很高,若要保持长期的高速运转,需要将机器
2014-01-10 -
桁架式机床上下料机器人的上下料传送机
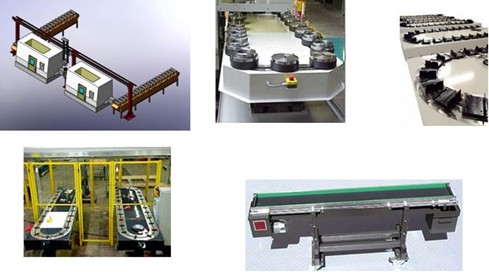
桁架式机床上下料机器人的下料传送机构通常是指传送带,要求尽量节省空间。一个窄传送带可满足多台机床的下料,这样有利于后续人工对零件的检验、装箱和搬运。对于一些加工时间长的零件或大型零件,通常可将上料仓与下料仓通用。 以下是兰生工业自动化科技
2012-12-18 -
桁架式机床上下料机器人的旋转式料仓
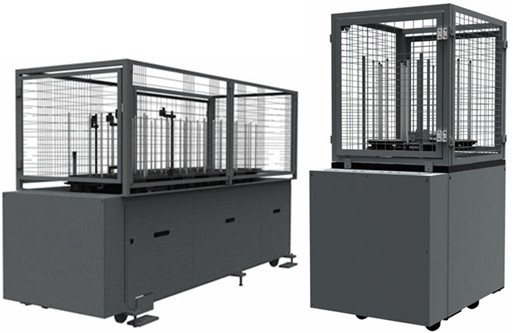
兰生提供的桁架式机床上下料机器人的旋转料仓,由驱动电机、减速机,链条、托盘、举升装置和控制系统等构成。料仓的旋转采用减速机带动链条旋转实现,由传感器控制料仓内托盘的位置,物料的进给采用电机和减速机带动链条上的托板升降来实现,自动料仓
2014-01-10

