

桁架式机床上下料机器人的抓手设计要求
发布日期:2012-12-18 兰生客服中心 浏览:5713
机器人末端执行器是安装在机器人手腕上用来进行某种操作或作业的附加装置。机器人末端执行器的种类很多,以适应机器人的不同作业及操作要求。末端执行器可分为搬运用、加工用和测量用等。
搬运用末端执行器是指各种夹持装置,用来抓取或吸附被搬运的物体。
加工用末端执行器是带有喷枪、焊枪、砂轮、铣刀等加工工具的机器人附加装置,用来进行相应的加工作业。
测量用末端执行器是装有测量头或传感器的附加装置,用来进行测量及检验作业。
在设计机器人末端执行器时,应注意以下问题;
1、机器人末端执行器是根据机器人作业要求来设计的。一个新的末端执行器的出现,就可以增加一种机器人新的应用场所。因此,根据作业的需要和人们的想象力而创造的新的机器人末端执行器,将不断的扩大机器人的应用领域。
2、机器人末端执行器的重量、被抓取物体的重量及操作力的总和机器人容许的负荷力。因此,要求机器人末端执行器体积小、重量轻、结构紧凑。
3、机器人末端执行器的万能性与专用性是矛盾的。万能末端执行器在结构上很复杂,甚至很难实现,例如,仿人的万能机器人灵巧手,至今尚未实用化。目前,能用于生产的还是那些结构简单、万能性不强的机器人末端执行器。从工业实际应用出发,应着重开发各种专用的、高效率的机器人末端执行器,加之以末端执行器的快速更换装置,以实现机器人多种作业功能,而不主张用一个万能的末端执行器去完成多种作业。因为这种万能的执行器的结构复杂且造价昂贵。
4、通用性和万能性是两个概念,万能性是指一机多能,而通用性是指有限的末端执行器,可适用于不同的机器人,这就要求末端执行器要有标准的机械接口(如法兰),使末端执行器实现标准化和积木化。
5、机器人末端执行器要便于安装和维修,易于实现计算机控制。用计算机控制最方便的是电气式执行机构。因此,工业机器人执行机构的主流是电气式,其次是液压式和气压式(在驱动接口中需要增加电-液或电-气变换环节)。
-
桁架式机器人应用
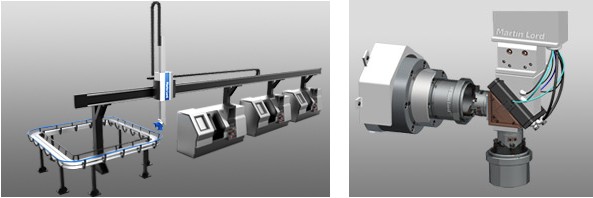
兰生公司的战略合作伙伴英国马丁路德机器人公司,提供的龙门式(桁架式)机器人为数控车床、立式加工中心机、卧式加工中心机、数控立式车床、数控磨床、数控磨齿机、数控焊接、 数控切割等设备的零件加工提供了自动化解决方案,其高可靠性、高速度、高精度的
2012-12-18 -
桁架式机床上下料机器人集成应用的其他技术
兰生工业自动化科技有限公司的桁架式机床上下料机器人集成,与马丁路德、机器人制造商共同合作。针对客户不同的需求,在桁架式机床上下料机器人自动化集成还应用了其他的相关技术。 1、润滑技术 机器人往往都很高,若要保持长期的高速运转,需要将机器
2014-01-10 -
桁架式机床上下料机器人的上下料传送机
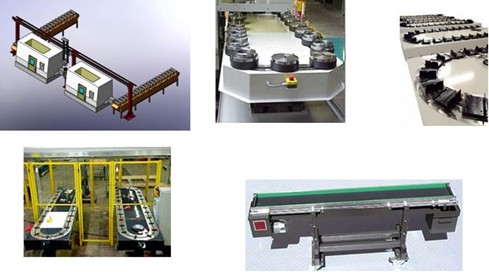
桁架式机床上下料机器人的下料传送机构通常是指传送带,要求尽量节省空间。一个窄传送带可满足多台机床的下料,这样有利于后续人工对零件的检验、装箱和搬运。对于一些加工时间长的零件或大型零件,通常可将上料仓与下料仓通用。 以下是兰生工业自动化科技
2012-12-18 -
桁架式机床上下料机器人的旋转式料仓
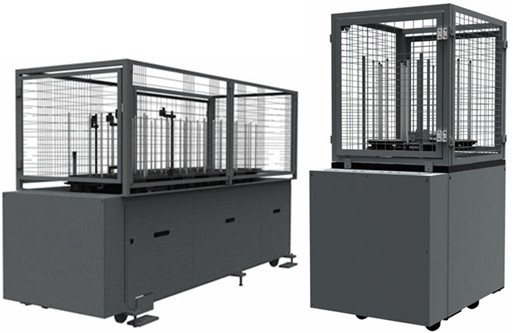
兰生提供的桁架式机床上下料机器人的旋转料仓,由驱动电机、减速机,链条、托盘、举升装置和控制系统等构成。料仓的旋转采用减速机带动链条旋转实现,由传感器控制料仓内托盘的位置,物料的进给采用电机和减速机带动链条上的托板升降来实现,自动料仓
2014-01-10

