

FANUC机器人文件的输入/输出
发布日期:2012-06-11 兰生客服中心 浏览:9071
一、文件的输入/输出设备
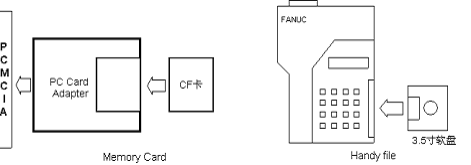
R-J3控制器有两种文件输入/输出设备可以使用(见图1):
•Memory Card
•Floppy disk(Handy file)
图1

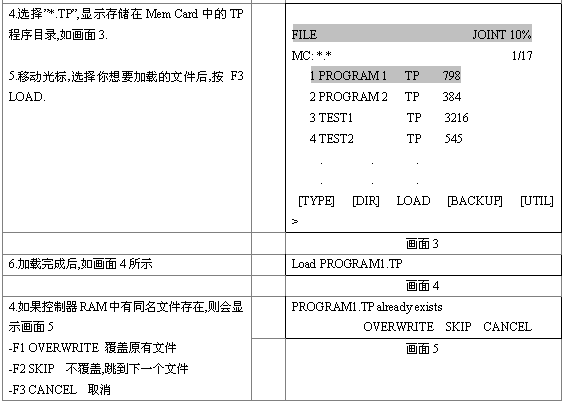
1、选择文件输入/输出设备
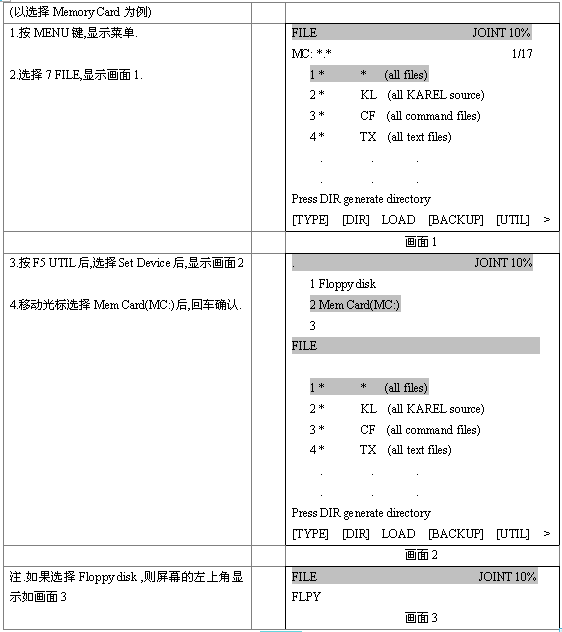
2、文件
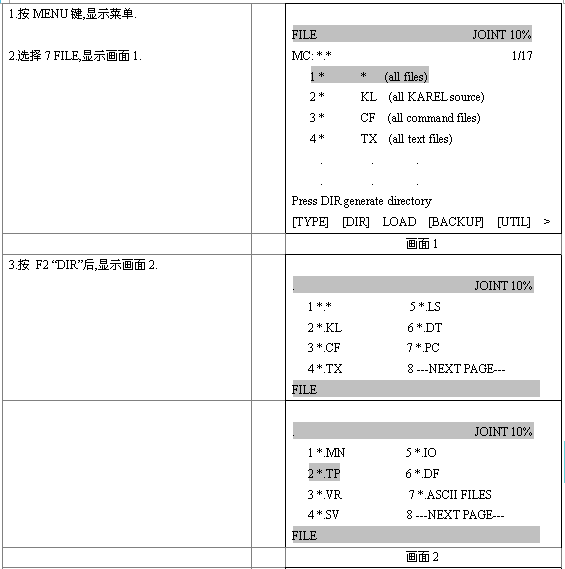
在R-J3控制器的存储器中,有以下几种类型的文件
|
• 程序文件(*.TP) |
|
|
• 默认的逻辑文件(*.DF) |
|
|
• 系统文件(*.SV) |
用来保存系统设置 |
|
• I/O配置文件(*.I/O) |
用来保存I/O配置 |
|
• 数据文件(*.VR) |
用来保存诸如寄存器数据 |
(1)程序文件
程序文件被自动存储于控制器的CMOS中,通过TP上的SELECT键可以显示程序文件目录.
注意: 文件输入/输出画面并不显示程序文件目录.
一个程序文件包括以下信息:
|
• Comment |
显示注释 |
|
• Write protection |
显示写保护状态 |
|
• Modification date |
显示最后一次编辑的间 |
|
• Program Size |
显示程序大小 |
|
• Copy source |
显示拷贝来源 |
(2)默认的逻辑文件
默认的逻辑文件包括在程序编辑画面中, 各个功能键(F1到F4)所对应的默认逻辑结构的设置.
|
|
|
|
|
|
|
|
|
|
|
|
(3)系统文件
|
• SYSVARS.SV |
用来保存坐标,参考点,关节运动范围,抱闸控制等相关变量的设置 |
|
• SYSSERVO.SV |
用来保存伺服参数 |
|
• SYSMAST.SV |
用来保存Mastering数据 |
|
• SYSMACRO.SV |
用来保存宏命令设置 |
|
• FRAMEVAR.SV |
用来保存坐标参考点的设置 |
(4)数据文件
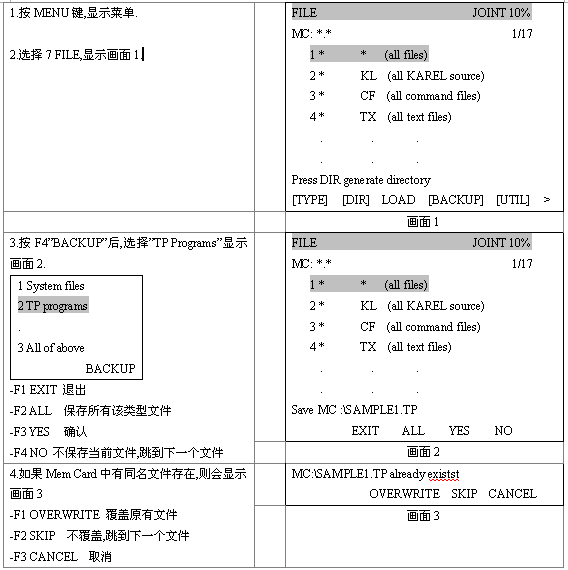
二、备份文件和加载文件
备份文件和加载文件的关系见图2
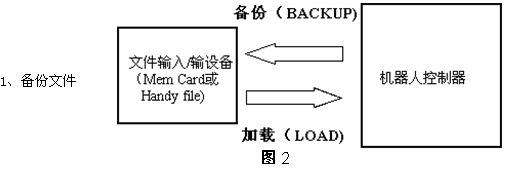
2、加载文件
上一篇:FANUC机器人Mastering
下一篇:FANUC机器人宏MACRO
-
FANUC机器人示教
一、安全操作规程1、示教和手动机器人(1)请不要带者手套操作示教盘和操作盘。 (2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 (3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 (4)要预先考虑好避让机
2012-06-11 -
FANUC机器人的执行程序
一、程序中断和恢复程序中断由以下两种情况引起:■ 程序运行中遇到报警■ 操作人员停止程序运行 程序的中断状态有两种类型: 有意中断程序运行的方法:■ 按下TP或操作箱上的急停按钮,还有可以输入外部E-STOP信号。 输入UI[1] *
2012-06-11 -
FANUC机器人程序结构
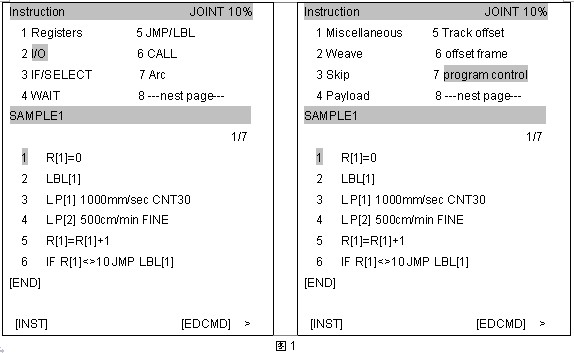
一、运动指令运动指令已经在编程一章中讲过,在这里我们重点讨论弧焊指令,寄存器指令,I/O指令,分支指令,等待指令,偏置指令,程序控制指令和其他常用的指令。这些指令都是通过程序编辑画面中的[INST]进入的(见图1) 注意:不同的软件,
2012-06-11 -
FANUC机器人FRAMES的设置
一、坐标系的分类(见表1) 表1 World Frame(通用坐标系) 是一个不可设置的缺省坐标系。其原点是用户坐标系和点动坐标系的参考位置,位于机器人内预先定义的位置。 ToolFrame(工具坐标
2012-06-11

