

桁架式机床上下料机器人抓手的结构
发布日期:2012-12-18 兰生客服中心 浏览:7326
1、楔块杠杆式手爪
利用楔块与杠杆来实现手爪的松、开,来实现抓取工件。
2、滑槽式手爪
当活塞向前运动时,滑槽通过销子推动手爪合并,产生夹紧动作和夹紧力,当活塞向后运动时,手爪松开。这种手爪开合行程较大,适应抓取大小不同的物体。
3、连杆杠杆式手爪
这种手爪在活塞的推力下,连杆和杠杆使手爪产生夹紧(放松)运动,由于杠杆的力放大作用,这种手爪有可能产生较大的夹紧力。通常与弹簧联合使用。
4、齿轮齿条式手爪
这种手爪通过活塞推动齿条,齿条带动齿轮旋转,产生手爪的夹紧与松开动作。
5、平行杠杆式手爪
采用平行四边形机构,因此不需要导轨就可以保证手爪的两手指保持平行运动,比带有导轨的平行移动手爪的摩擦力要小很多。
-
桁架式机器人应用
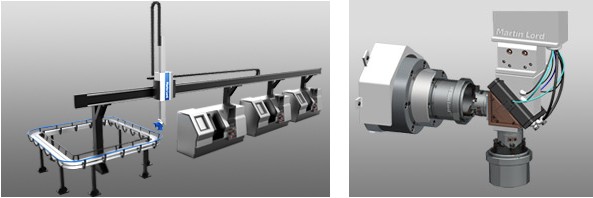
兰生公司的战略合作伙伴英国马丁路德机器人公司,提供的龙门式(桁架式)机器人为数控车床、立式加工中心机、卧式加工中心机、数控立式车床、数控磨床、数控磨齿机、数控焊接、 数控切割等设备的零件加工提供了自动化解决方案,其高可靠性、高速度、高精度的
2012-12-18 -
桁架式机床上下料机器人集成应用的其他技术
兰生工业自动化科技有限公司的桁架式机床上下料机器人集成,与马丁路德、机器人制造商共同合作。针对客户不同的需求,在桁架式机床上下料机器人自动化集成还应用了其他的相关技术。 1、润滑技术 机器人往往都很高,若要保持长期的高速运转,需要将机器
2014-01-10 -
桁架式机床上下料机器人的上下料传送机
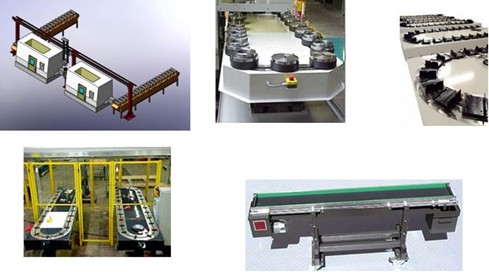
桁架式机床上下料机器人的下料传送机构通常是指传送带,要求尽量节省空间。一个窄传送带可满足多台机床的下料,这样有利于后续人工对零件的检验、装箱和搬运。对于一些加工时间长的零件或大型零件,通常可将上料仓与下料仓通用。 以下是兰生工业自动化科技
2012-12-18 -
桁架式机床上下料机器人的旋转式料仓
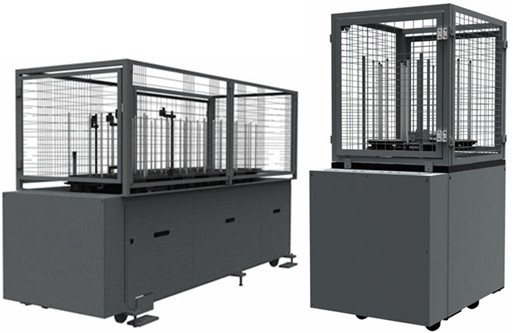
兰生提供的桁架式机床上下料机器人的旋转料仓,由驱动电机、减速机,链条、托盘、举升装置和控制系统等构成。料仓的旋转采用减速机带动链条旋转实现,由传感器控制料仓内托盘的位置,物料的进给采用电机和减速机带动链条上的托板升降来实现,自动料仓
2014-01-10

