

工具型打磨机器人
发布日期:2013-10-11 兰生客服中心 浏览:5850
工具型打磨机器人,是机器人通过操纵末端执行器固连打磨工具,完成对工件打磨加工的自动化系统。
工具型打磨机器人,由工业机器人本体和打磨工具系统力控制器、刀库、工件变位机等外围设备组成,由总控制电柜固连机器人和外围设备,总控制柜的总系统分别调控机器人和外围设备的各个子控制系统,使打磨机器人单元按照加工需要,分别从刀库调用各种打磨工具,完成工件各个部位的不同打磨工序和工艺加工。
工具型打磨机器人,主要用于大型工件的打磨加工,例如大型铸件、叶片、大型工模具等。
(一)、工业机器人本体
1、打磨机器人一般要选用6关节工业机器人。这样机器人有6个自由度,可以通过改变机器人姿态,使打磨工具可以从各种角度,完成工件不同部位的打磨加工。
2、打磨机器人要选用具有一定刚性的工业机器人,以适应工具打磨形成的冲击力。
3、打磨机器人采用的工业机器人要有一定精度,以保持工件打磨的一致性,工件高精度打磨,则要选用精度较高的工业机器人。
4、工业机器人的工作范围要能满足工件加工,防止打磨工具干涉。
(二)、工具型打磨机器人的工具系统
1、工具型打磨机器人的刀库系统,要能储存3~5把打磨工具。
2、打磨工具包括铣削、磨削、抛光工艺加工的铣刀、磨头、抛光轮等,满足粗、细、精等工艺加工。
(三)、工具型打磨机器人的末端执行器
1、刀具动力装置,一般采用电动或气动方式。
2、电主轴的功率、转速要满足打磨需要的工效和光洁度。
(四)、配置力控制器
避免机器人和刀具过载而损坏,同时力控制器使打磨工具对工件的作用力能相对恒定,可以保持打磨工件的一致性,保证打磨精度。
(五)、机器人行走导轨
打磨机器人可以通过导轨行走,扩大工作范围,同时也有利用不同车间场地的机器人单元的布局。
(六)、工件变位机
通过变位机的回转式翻转,便于打磨机器人夹持的各种打磨工具,避免工件干涉而到达打磨部位。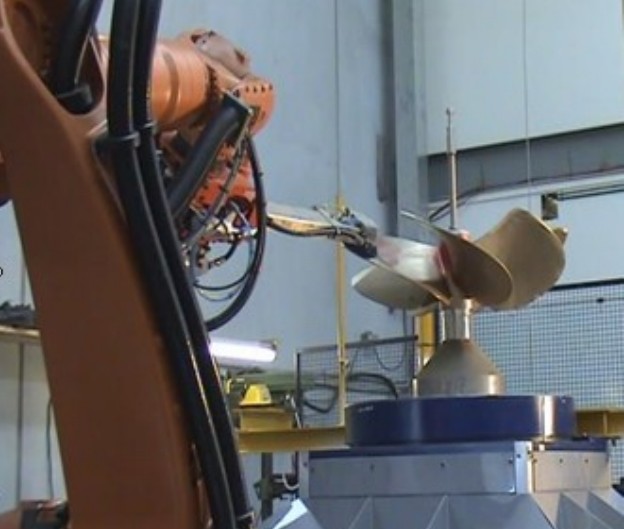
机器人末端执行器夹持打磨工具对军舰螺旋桨叶片进行打磨抛光作业 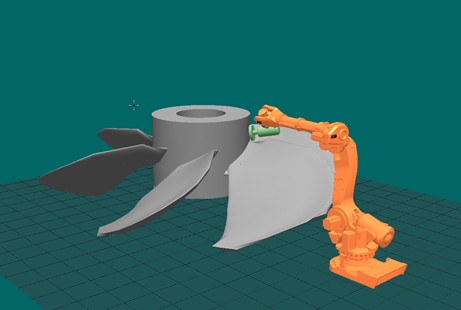
机器人末端执行器夹持打磨工具对叶片打磨抛光的模拟图
上一篇:打磨机器人替代人工的优越性
下一篇:工件型打磨机器人
-
打磨机器人项目的安装施工
打磨机器人项目的系统集成商,在完成调试检验并经客户认可预验收后,就可以出库发货到客户的工厂现场安装调试,这一阶段工作,主要完成机器人打磨机具和其它设备的安装就位,总控制电柜的布管布线、现场示教、路径优化、客户培训、陪产等一系列现场服务工作。
2013-10-09 -
打磨机器人的样机试验
当项目设计方案完成并经客户认可后,打磨机器人系统集成的项目实施就进入制造、装配、试验阶段。 1、按设计图纸要求,制造打磨机具、爪手、总控制电柜等设备。 2、按照3D仿真位置,布置安装机器人和外围设备,模拟运行。 3、打磨试验。按
2013-10-09 -
打磨机器人项目的方案设计
打磨机器人系统由工业机器人、打磨机具、力控制设备、终端执行器等外围设备硬件系统和机器人力矩等软件系统组成。打磨机器人的自动化系统集成,就是将组成打磨机器人的各种软硬件系统集成为相互关联,统一协调总控制系统,以实现机器人的自动化打磨、抛光、去
2013-10-12 -
打磨机器人的智能化
打磨机器人要替代人工实现高效率、高质量的自动化打磨,必须对机器人的位置和磨削力这两个方面进行有效控制。其中最为核心的是力控制技术,通过控制打磨加工轨迹和打磨工具末端的力度,来保证打磨的质量。 打磨机器人力矩传感器及力控软件的应用,使机器人
2013-10-12

