

五轴铣削刀具干涉处理
发布日期:2012-10-23 兰生客服中心 浏览:7270
随着现代工业中零件复杂曲面设计的增加,五轴加工在数控加工中所占比重将愈来愈大。由于五轴数控加工加入了两个旋转自由度,增加了数控加工运动模拟计算和刀具干涉检查的难度,特别是在加工形状极其复杂的零件表面时,更是如此。因此,为了确保五轴数控机床进行高效率和高质量的切削加工,开发五轴加工刀具轨迹生成及其干涉检查的软件将成为研究者面临的重大课题。
提出一种适用于五轴数控加工刀具干涉处理的特征投影法,即将加工曲面离散成一系列曲面特征点,是否发生刀具干涉可由特征点是否进入刀具表面内部来判断。同时将加工曲面和刀具表面投影到一个特定平面上,仅将包络刀具投影图形的曲面区域内的特征检测点进行干涉检查,提高干涉检测的效率。
1.干涉检查方法
坐标系及坐标变换
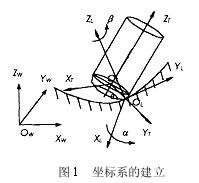
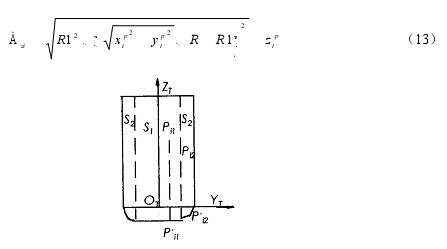
如图1所示,五轴环行刀NC加工的局部坐标系L表示为XL轴、YL轴和ZL轴,YL轴总是指向该刀触点(CutterContactPoints,简称CC点)OL的走刀方向f,ZL轴指向曲面外法线方向n,而XL轴则由YL轴和ZL轴的右手法则确定。刀具一般绕XL轴由ZL轴向YL轴方向旋转一个导前角(后跟角)a,和绕ZL轴旋转一个又一个侧偏角b。另外,在刀位点(CutterLocationPoints,简称CL点)OT处还可定义刀具坐标系T(XT,YT,ZT),其中YT轴指向CL点和CC点连线方向,ZT轴为刀轴矢量方向,XT轴是由YT轴和ZT轴的右手法则确定的方向,坐标原点位于刀具中心点(即CL点)OT。为了简化干涉检查,以形状较为规则的刀具表面作为基准进行干涉检测,加工曲面经过离散后以一组特征点的形式来表示曲面形状,这些特征点的原始数据均在世界坐标系W中表示,因此首先必须将特征点数据从世界坐标系W(OW-XW,YW,ZW)变换到局部坐标系L(OL-XL,YL,ZL),再由局部坐标系L变换到刀具坐标系T(OT-XT,YT,ZT)中来表示。
干涉检查方法
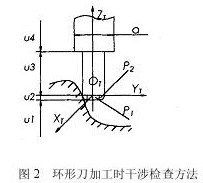
如果刀具和动力头已选定,则刀具系(刀具和动力头)的尺寸即为已知,刀具系与加工曲面是否发生干涉,可由判别特征点P是否进入刀具表面内部来确定。如图2所示,为环形刀加工时刀具系与加工曲面的位置关系,在刀具坐标系中,设特征点P的坐标为PI(Xpt,Ypt,Zpt),根据刀具系的不同组合部分,将特征点P的坐标值Zpt分为4段进行判别,具体情况如下:
当特征点P处于u1段范围内,则不会发生干涉。
当特征点P处于u2范围内,有两种情况,将圆环体分成两部分:小圆柱部分P1和圆环部分P2。当特征点涉入圆柱部分P1时,发生刀具干涉,即满足

式中R表示刀具半径,R1表示环行刀的圆环半径。
当特征点涉入圆环部分P2时,也发生刀具干涉,即满足

式中
若特征点P没有进入P1和P2部分,则不发生刀具干涉。
当特征点P处于u3段范围内,则当特征点P至ZT轴之间的距离小于刀具半径时,发生刀具干涉,即满足

否则,不发生刀具干涉。
当特征点P处于u4段范围内,情况同3,只要把式(3)中刀具半径R换成动力头半径d/2来进行判别即可。
把与刀具系发生干涉的曲面特征点称为干涉点,按上述方法检测出所有的干涉点,并计算各干涉点径向方向上的干涉量,然后采用适当的方式来消除干涉。
检查的特征投影法
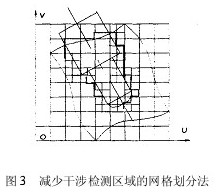
将刀具系和曲面特征点投影到一个二维的平面(投影平面)上,在二维投影平面上取合理的间距对加工曲面进行网络划分,分割成一系列正方形。如图3所示,当正方形完全被投影刀具系轮廓覆盖时,记为完全正方形,在该区域内的曲面特征点有可能与刀具系发生干涉;当正方形完全没有被投影刀具系轮廓相交时,记为非正方形,不可能与刀具系发生干涉;当正方形部分被投影刀具系轮廓覆盖时,记为部分正方形。为了进一步减少特征点的检查数目,对部分正方形作一次四叉树分割处理,删除非正方形,将可能发生干涉的特征点按区域顺序,重新编制检测文件,然后进行坐标变换和干涉检查。
2.干涉消除方式
旋转刀轴方式
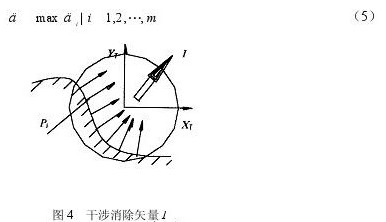
在一个刀位点处,曲面特征点于刀具系发生干涉的有m个,综合考虑m个干涉点的干涉情况,可找到一个消除干涉的最佳方向,以便最有效地消除刀具干涉。为此,引入了“干涉消除平面”的新概念,把m个干涉点处的曲面法矢量投影到刀具坐标系T的XTYT平面上,设干涉点处的曲面法矢量在XTYT平面上的投影为nxyi(i=1,2,…,m),干涉点在XTYT平面上的干涉分量为Dt(i=1,2,…,m)。如图4所示,则干涉消除矢量I可由下式求出

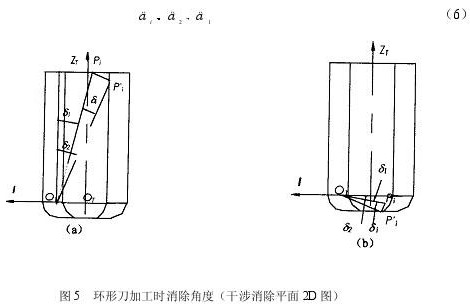
由式(4)求出干涉消除矢量I(Sx,Sy,Sz)之后,再由干涉消除矢量I和ZT轴构成干涉消除平面。设由轴ZT和消除矢量I的叉乘矢量为K,在平行于“干涉消除平面”的平面上计算刀具绕K轴向I倾斜多大的干涉消除角度d能刚好消除刀具干涉,如图5所示。设将干涉点Pi(i=1,2,…,m)排除在刀具系表面之外所需要的最小角度为di(i=1,2,…,m),则干涉消除角度d是所有角度di的最大值
要把干涉点Pi排除在刀具系之外,干涉点Pi固定不动,刀具系绕K轴向I方向旋转,等价于干涉点Pi相对于刀具系和刀具坐标系在平行干涉消除平面IOTZT的平面内转动di角度,下面以环形刀为例加以分析。
如图5所示,环形刀加工时刀具系的旋转轴经过消除平面IOTZT与刀具圆环面的交圆弧中心点O1,并平行于矢量K,过干涉点Pi,平行于消除平面IOTZT作一截平面,截平面与刀具圆环面的交线为4次曲线,与圆柱面的交线为两直线。环形刀的刀轴旋转分两种情况,当干涉点Pi落入环形刀圆柱体内,旋转角度di为∠PiOPi’(图5a),计算公式为
而角度d1计算如下
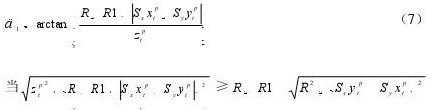
当时,点Pi在旋转过程中与圆柱表面截线相交,d2的计算公式为

当点Pi在旋转过程中不与圆柱截线相交时,则点Pi’可能与圆环截面4次曲线或刀具底平面截线相交。与圆环截面4次曲线相交时,角度d2的计算较复杂,为了简化计算,对旋转角度作保守处理。这时,计算出的角度d2要比实际角度大,但对于刀具干涉处理没有影响。保守处理点Pi’均旋转到与刀具底平面相交,这时角度d2等于

如图5(b)所示,当干涉点Pi落入环形刀圆环体内,同样对旋转角度作保守处理,点Pi’均旋转到与刀具底平面相交,旋转角度di为∠PiOPi’,计算公式同式(6),其中角度d1和d2的计算如下
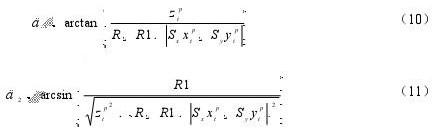
当式(11)中的分母小于分子时,点Pi’在旋转过程中不能与刀具底平面相交,这时不能通过旋转刀轴方式来消除干涉,但这种情况可能性极小。
同理可处理动力头圆柱体内的干涉点。
虽然刀具系可通过向I方向旋转d角度来消除干涉点,但刀具系在旋转过程中有可能再与其他曲面特征点发生干涉。因此刀具系旋转后,必须计算新的刀轴矢量,并重新建立新的刀具坐标系,再进行与曲面的干涉检查。当干涉现象不能通过旋转刀轴方式消除时,则采用沿刀轴方向的抬刀方式来消除。
抬刀方式
采用沿刀轴方向抬刀方式消除干涉时,应计算沿ZT方向的抬刀量。对于m个干涉点Pi(i=1,2,…,m),计算每个干涉点排除的抬刀量Dzi(i=1,2,…,m),并同样取其中最大量为刀具抬刀量Dz。
如图6所示,为环形刀加工时抬刀量的计算,有两种情况。当干涉点Pi落入半径为(R-R1)的刀具圆柱体S1内时,刀具向上抬刀,干涉点最后与刀具底平面相交,其抬刀量计算为

当干涉点Pi落于半径差为R1的圆环体S2内时,抬刀时干涉点与刀刃圆弧面相交,其抬刀量为
(1)确定曲面的CC点,法矢量n和走刀矢量f,计算刀具的CL点,建立相应的坐标系,计算初始刀轴矢量Ti(i=1,2,…,n);
(2)对于一个刀位点,选择一个特定平面,将刀具系与加工曲面投影到该平面上;
(3)在投影平面上对加工曲面进行网络划分,得一系列正方形区域。用标记符Tag表示正方形的性质,Tag=1时,为完全正方形,接收;Tag=2时,为非正方形,丢弃;Tag=3时,为部分正方形,需要作一次四叉树分割,丢弃非正方形;
(4)将分割后得到的完全正方形和部分正方形区域内的曲面特征点按区域顺序排列,重新编制成检测文件,并将这些特征点Pi从世界坐标系W向刀具坐标系T进行坐标变换;
(5)在刀具坐标系T中,将特征点Pi(xipp,yip,zipp)的坐标值进行分段,判断点是否落入刀具系表面内,若落入则发生干涉,转下一步;若不发生干涉,转10;
(6)需采用抬刀方式消除干涉,转9;其他情况采用旋转刀轴方式来消除干涉,转下一步;
(7)确定干涉消除平面,计算消除干涉的旋转角度di;
(8)计算新的刀轴矢量Ti’,确定新的刀具坐标T’,重复步骤4和5确定旋转刀轴方式是否能消除干涉。若能消除,则转入10;若不能消除,则转入下一步;
(9)刀轴方向的抬刀量Dzi,用抬刀方式消除干涉,并记录该刀位点的序号,以便走刀后作补充加工;
(10)判断是否是最后一个刀位点,若不是则取下一个刀位点,转入2;
输出检测结果,结束。
3.算法实现
复杂曲面的五轴数控加工
该干涉处理方法是针对于五轴端铣数控加工的情况提出来的,并从干涉处理方法和减少检测区域两个方面来简化干涉的处理过程。提出了以刀具系表面为检测基准,并将加工曲面离散成一组曲面特征点,这样一个复杂的三维空间中的刀具干涉检查问题就简化为一个简单的平面计算问题。同时,为了更有效地消除刀具干涉,根据干涉情况确定了一个消除干涉的干涉消除平面。另外,通过将刀具系与曲面特征点投影到一个特定的平面上,并对投影平面进行网络划分,删除一些无关的检测区域,可大大缩短计算时间。这种方法可用于处理球头刀、平底刀和环形刀加工时的啃切干涉和碰撞干涉,算法稳定、便于实现。
-
高速五轴加工中心在汽车模具制造中的应用
导读:现在汽车模具对模具的表面质量和切削加工速度所提出的要求已经越来越高。应用五轴数控系统加工带有三维曲线的平面时可以取得最佳切削状态,在机床加工区域内的任意位置通过刀具轴的设置角度改变,加工不同的几何形状。 三轴加工中心做深腔模具加
2014-10-15 -
电解红铜薄壁电极的基本外形铣削加工
曲面薄壁电极多广泛用于注塑模具、压铸模具的制造中,其作用为形成产品的薄片形状,如摩托车发动机中的散热片、电脑机箱内的铝合金散热片及音响产品的电源散热窗口形状等。如图1所示。 一、曲面薄壁电极一般特点是: 1、电极高度较高,最高
2013-09-10 -
薄壁电极曲面的铣削加工
对于电解红铜薄壁电极的曲面铣削加工分两个部分: 一、电极曲面粗铣 使用SurfaceRoughPocket编程即曲面粗加工的形式进行曲面粗铣削,如图3所示,为节省时问仍继续使用φ16mm端铣刀,转速1200r/min,进给速度νf=
2013-09-10 -
薄壁电极曲面精加工
在曲面精加工之后再进行薄壁形状的精加工成形,如果先加工外形轮廓后加工顶部曲面,则此时薄壁形状太高,在刀具切削力的作用下铜电极顶部常会发生变形弯曲,造成加工失败,这也是薄片电极加工中最容易出现的问题。同时,由于薄片之间为5.0mm窄槽,只能用
2013-09-10

