

龙门式机器人的编程
发布日期:2012-12-07 兰生客服中心 浏览:5533
第三节:马丁路德龙门式机器人的编程
龙门式机器人是基于一体化的IPC+MotionControl解决方案,保证系统具有高稳定性、高精度,基础硬件包括机器人机械运动系统、机器人电气驱动系统和基于DSP的固高GUC系列运动控制器三部分组成。机器人的X、Y、Z轴分别配置相应功率的伺服电机。
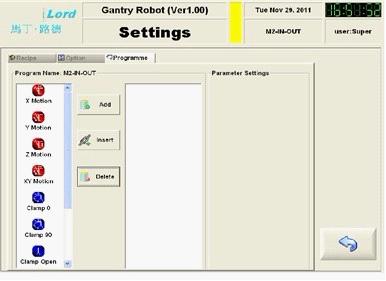
系统上位机操作系统采用WindowsXP,基于VisualC++开发了系统的操作软件,下图是主界面:

现有的机器人操作基本均采用手持操作器,其缺点是编程必须采用文字形式,这样用户必须首先学 习编程指令,在学会的基础上再以文字形式编程,这样一方面对用户的学习和接受能力有一定要求,另一方面对用户的编程能力也有相当高的要求,而本系统给出了全新的图形化的编程方式(见下图),正好克服了现有机器人操作的缺陷,同时编完的动作过程可以保存,需要时可以调用,同时本系统仍然支持手动教导。
通过上述操作软件完成编程后,运动控制器就会输出信号与电机驱动器通信,从而驱动伺服电机运转,通过同步带使得机器人的X、Y、Z做直线运动,电机运动位置和速度通过编码器检测返回到驱动器以时间位置的闭环控制。
系统采用松下MINASA5系列中惯量伺服电机来驱动X、Y、Z轴的运动,该系列电机具有高响应、高速定位、定位时间短等优点,控制模式采用位置控制,控制器产生脉冲信号,脉冲数和频率分别对应控制电机的运动位置和速度。
-
ABB机器人的变位机

第一节:ABB机器人的变位机 ABB提供全方位的工件定位,不论是编程期间还是运行期间,都确保各轴均与机器人完全协调一致。变位机配有简单明了的编程说明,使用十分方便。变位机的驱动系统和软件均与机器人相同。 动态软件(HPP,即高性能变
2012-12-07 -
KUKA机器人的工件变位机

第二节:KUKA机器人的工件变位机 KUKA机器人的工件定位装置每种自动化解决方案的目标都是提高生产效率及质量。借助KUKA Posiflex System您可在任何位置实现这一目标 — 因为它可以迅速精确地校准部件。对于例如自动化气体保
2012-12-07 -
ABB的机器人导轨系统
第一节:ABB的机器人导轨系统 ABB导轨系统(Track Motion)的设计宗旨是确保机器人的效能得到充分而可靠的发挥,实现客户自动化投资价值的最大化。机器人导轨能够极大地延伸机器人的工作覆盖范围,使一台机器人能够同时服务于多台设备,
2012-12-07 -
KUKA的机器人导轨
第二节:KUKA的机器人导轨 KUKA线性滑轨能够确保整条生产线上的生产效率最大化。有了库卡线性滑轨,作业空间将显著增大。另一项重要优势: 线性滑轨以附加轴的形式工作 — 因此无需附加的控制系统。 库卡产品系列涵盖所有负载级别、所有环境
2012-12-07

