

离线编程技术
发布日期:2012-12-07 兰生客服中心 浏览:5428
第二节:离线编程技术
一、技术介绍
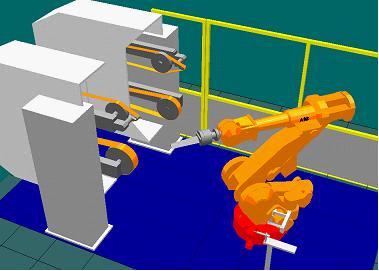
离线编程将工业加工过程所需要的三维信息通过CAD模型、三维测量仪器输入到交互式机器人系统软件。根据输入信息该模块自动产生机器人运动轨迹和程序。并针对不同的加工过程设置相应的加工过程参数,对生产过程进行控制。与常用的手工在线逐点机器人编程法相比较,该模块的使用将大大缩短编程时间。采用离线编程避免了生产过程的中断,提高了设备使用率。以下ABB机器人为例,说明如下:
二、系统特点
1. 离线编程系统具有强大的兼容性,可输入多种不同类型的三维信息,包括CAD模型、三维扫描仪扫描数据、便携式CMM数据、以及CNC路径等。
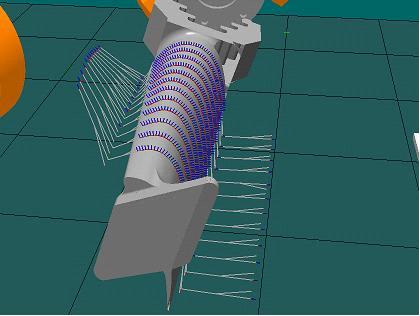
2. 多种机器人路径生成方式相结合:用鼠标在三维模型上选点;自动在曲面上产生UV曲线、边缘曲线、特征曲线等;曲面与曲面的相交线;曲线的分割、整合等;机器人路径的批量产生等。
3. 通过加工过程参数,在机器人加工路径的基础上,可自动生成完整的机器人加工程序。生成的程序可直接应用到实际机器人上,进行生产加工。
4.基于ABB虚拟控制器技术,您可以向离线编程系统中导入各种类型的机器人和外部轴设备,这些机器人具备和真实机器人同样的机械结构和控制软件,因此您可以在离线编程系统中模拟机器人的各种运动、控制过程,全程对生产过程时间及周期进行准确测算,还可以进行系统的布局设计、碰撞检测等。
三、系统效益
1.降低新系统应用的风险:在采用新的机器人系统前,可以通过离线编程平台进行新系统的测试,从而避免应用上的风险,同时降低新系统的测试成本。
2. 缩短机器人系统编程时间:尤其是对于复杂曲面形状的工件来说,采用离线编程软件可显著缩短产生机器人运动路径的时间。
3.无需手工编写机器人程序:通过各种控制模型,在离线编程软件中可以自动生成完整的可用于实际机器人上的机器人程序。
4.缩短新产品投产的时间。
5.通过离线编程,减少了占用实际生产系统的时间,增加生产效益。
6.虚拟仿真技术的应用提高了机器人系统的安全性。
上一篇:机器人操作示教
下一篇:FANUC机器人的编程
-
ABB机器人的变位机

第一节:ABB机器人的变位机 ABB提供全方位的工件定位,不论是编程期间还是运行期间,都确保各轴均与机器人完全协调一致。变位机配有简单明了的编程说明,使用十分方便。变位机的驱动系统和软件均与机器人相同。 动态软件(HPP,即高性能变
2012-12-07 -
KUKA机器人的工件变位机

第二节:KUKA机器人的工件变位机 KUKA机器人的工件定位装置每种自动化解决方案的目标都是提高生产效率及质量。借助KUKA Posiflex System您可在任何位置实现这一目标 — 因为它可以迅速精确地校准部件。对于例如自动化气体保
2012-12-07 -
ABB的机器人导轨系统
第一节:ABB的机器人导轨系统 ABB导轨系统(Track Motion)的设计宗旨是确保机器人的效能得到充分而可靠的发挥,实现客户自动化投资价值的最大化。机器人导轨能够极大地延伸机器人的工作覆盖范围,使一台机器人能够同时服务于多台设备,
2012-12-07 -
KUKA的机器人导轨
第二节:KUKA的机器人导轨 KUKA线性滑轨能够确保整条生产线上的生产效率最大化。有了库卡线性滑轨,作业空间将显著增大。另一项重要优势: 线性滑轨以附加轴的形式工作 — 因此无需附加的控制系统。 库卡产品系列涵盖所有负载级别、所有环境
2012-12-07

