

ABB机器人旋转关节的上紧
发布日期:2017-05-31 兰生客服中心 浏览:8804
ABB工业机器人常规保养维护
旋转关节的上紧
上紧部分包括机械手或控制器上的旋转接头:
1、旋转部位的说明和扭矩值只适用于金属部件,不适用于软的易碎的材料
该说明只适用于标准的旋转接头
UNBRAKO UNBRAKO 是一种由 ABB 推荐的特殊的螺钉,表面经过特殊处理,很耐用,在用到这种螺钉的地方会有说明,并且不能用其它螺钉替代.用其它螺钉不会保证不发生事故。
Gleitmo Gleitmo 是一种表面处理方法,经过这种处理后,在拧紧螺栓的时候会减小表面的摩这种螺栓可以重复使用 3-4 次,当表面的覆盖层消失后,必须更换新的,当拧动这种螺栓时,需戴上橡胶手套。
润滑 螺栓的润滑用 Molycote 1000(或其它润滑油),按以下步骤操作:
1、加润滑油在螺栓的螺纹上
2、加润滑油在螺栓的平垫和螺帽上
3、M8 以上的螺栓,必须用扳手上紧
润滑 编号
Molycote 1000 1171 2016-618
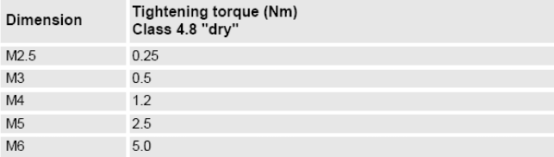
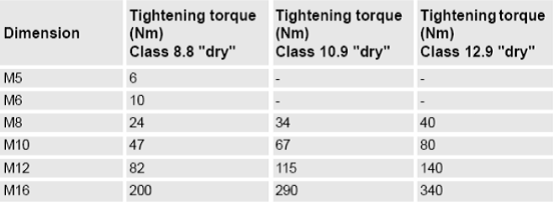
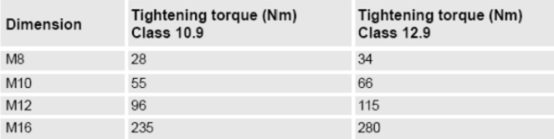
以下的表格描述不同螺栓的扭矩值
平口及十字型螺栓
六角套筒型螺栓
六角套筒型并带润滑的螺栓
2、标准工具 IRB6600/6650/7600
(1)标准工具
|
说明 |
数量 |
序列号 |
|
止脱螺栓(M16X60) |
2 |
3HAB 3409-86 |
|
校准笔 |
1 |
3HAC 15716-1 |
|
降下臂的工具 |
1 |
3HAC 13659-1 |
|
齿轮箱曲柄 |
1 |
3HAC 16488-1 |
|
定位销 M12X150 |
2 |
3HAC 13056-2 |
|
定位销 M12X200 |
2 |
3HAC 13056-3 |
|
定位销 M12X250 |
1 |
3HAC 13056-4 |
|
定位销 M8X100 |
2 |
3HAC 15520-1 |
|
定位销 M8X150 |
2 |
3HAC 15520-2 |
|
定位销 M10X100 |
2 |
3HAC 15521-1 |
|
定位销 M10X150 |
2 |
3HAC 15521-2 |
|
定位销 M16X300 |
2 |
3HAC 13120-5 |
|
定位销连接ax2,3,100mm |
1 |
3HAC 14628-2 |
|
定位销连接ax2,3,80mm |
1 |
3HAC 14628-1 |
|
液压滚筒 |
1 |
3HAC 11731-1 |
(2)特殊工具
|
液压泵 80Mpa |
1 |
3HAC 13086-1 |
|
起重设备,基座 |
1 |
3HAC 15560-1 |
|
起重设备,机器人 |
1 |
3HAC 15607-1 |
|
起重设备,上臂 |
1 |
3HAC 15994-1 |
|
吊物孔 VLBG M12 |
1 |
3HAC 16131-1 |
|
吊物孔 M12 |
2 |
3HAC 14457-3 |
|
吊物孔 M16 |
2 |
3HAC 14457-4 |
|
起重工具(链条) |
1 |
3HAC 15556-1 |
|
起重工具,变速箱 ax2 |
1 |
3HAC 13698-1 |
|
起重工具,电机 ax1,4,5 |
1 |
3HAC 14459-1 |
|
起重工具,电机 ax2,3,4 |
1 |
3HAV 15534-1 |
|
止脱螺栓 ax 3 |
2 |
3HAC 12708-1 |
|
压力工具 ax2 轴承 |
1 |
3HAC 13527-1 |
|
压力工具 ac 2 轴 |
1 |
3HAC 13452-1 |
|
压力工具,平衡设备轴 |
1 |
3HAC 17129-1 |
|
压力工具,平衡设备 |
1 |
3HAC 15767-1 |
|
拉力工具,平衡设备轴 |
1 |
3HAC 12475-1 |
|
移动工具,电机 M10x |
2 |
3HAC 14972-1 |
|
移动工具,电机 M12x |
2 |
3HAC 14631-1 |
|
移动工具,电机 M12x |
2 |
3HAC 14973-1 |
|
旋转工具 |
1 |
3HAC 17105-1 |
|
底座 |
1 |
3HAC 15535-1 |
|
调平工具 |
1 |
3HAC 15943-2 |
|
机械停止轴3的垫圈 |
2 |
3HAA 1001-186 |
3、检漏测试
当更换或修理电机或变速箱后,必须对变速箱内的油作个检查, 这就是检漏测试所需设备为专门的检查装置,序列号为 3HAC 0207-1 。
方法及步骤
|
步骤 |
方法 |
说明 |
|
1 |
按要求完成电机或齿轮的更换 |
|
|
2 |
打开齿轮箱顶端的油盖,然后将测漏装置放在上面.可能还需要工具包里的测漏装置的调节器 |
|
|
3 |
使用压缩空气,然后提高压力到一个特定值 |
推荐值:0.2-0.25bar (20-25KPa) |
|
4 |
断开压力空气连接 |
|
|
5 |
等待 8-10 分钟.(检查是否有压力损失) |
如果压缩空气的温度与齿轮围的油的温度相差太大,或许轻微的压力增减,这是正常的 |
|
6 |
看压力是否下降明显? |
|
|
7 |
用测漏喷嘴对怀疑有泄漏的地方喷射,起泡则说明有泄漏 |
|
|
8 |
发现有泄漏,请采取必要的措施改正 |
上一篇:ABB机器人的变位机
下一篇:ABB机器人使用SIS系统
-
FANUC机器人对机器人三轴减速器进行拆卸

1.将机器人三轴马达的四个连接螺钉拆下,将马达取出。用M8六角将二轴轴臂与三轴减速器的连接螺钉拆下。M10螺钉18个均布,然后用M14六角将剩余的(M16)6个螺钉拆除对应的两个,把制作的M16导向杆安装到减速器上,再将剩下的四个螺钉拆下。
2012-07-18 -
FANUC机器人对机器人二轴的减速器进行安装

1.将机器人二轴减速器用吊环吊起,在一轴本体上安装两个M12的导向杆,将减速器安到导向杆上,平行推动到机器人本体上,安装螺钉 。2.利用手拉葫芦将二轴轴臂吊起 ,在减速器上安装两个导向杆,将二轴臂推入导向杆中。安装连接螺钉并紧固到力矩值。3
2012-07-18 -
FANUC机器人对机器人二轴的减速器进行拆卸

1.将机器人二轴马达拆掉,用M10的六角将机器人的二轴轴臂与减速器连接螺钉拆下,(M12)21个,然后用M14六角将剩余的(M16)6个螺钉拆除对应的两个,把制作的导向杆安装到减速器上,再将剩下的四个螺钉拆下。 2.将机器人二轴轴臂移
2012-07-18 -
FANUC机器人对机器人平衡缸及二轴马达进行拆卸

1.将机器人所有轴打到零点位置,用吊带将平衡缸吊住,用制作的50mm外六方扳手将平衡缸后端的缸杆连接螺母卸下,拆下平衡缸前后连接轴套,将机器人平衡缸吊起.放到安全位置。拆下机器人电缆,将吊装工具安装到机器人本体上。使用手拉葫芦将吊带吊住.2
2012-07-18

