

ABB机器人使用SIS系统
发布日期:2012-12-07 兰生客服中心 浏览:7671
ABB工业机器人常规保养维护
使用 SIS 系统
1、基本方法及步骤
这是一个简短的维护信息系统(SIS)的使用说明,详细的资料可在以下几处找到:
* 维护信息系统,SIS
* 定义 SIS 输入参数
* 设置 SIS 参数
* SIS 参数的交换
* 读出 SIS 的输出日志
|
步骤 |
方 法 |
说 明 |
|
1 |
决定需要的系统功能 |
这会在下面一页介绍 |
|
2 |
选择适合工作环境的参数 |
这在后面的定义 SIS 输入参数( Defining the SIS input parameters)中会有说明.维护周期 则在维护手册中有说明 |
|
3 |
输入参数 |
怎样输入在设定 SIS 参数(Setting the SIS parameters)中有说明 |
|
4 |
正常运行机器人 |
|
|
5 |
如有修理任务或计数器需要 重新启动,请将计数器复位 |
|
|
6 |
当一个设定的时间到后,在 示教器(TPU)上会有提示信息 |
如何读在读出 SIS 的输出日志 (Reading the SIS output logs)中会 说明 |
|
7 |
如需要从外部电脑读出这些 信息或输入参数,则需要一套 专门的软件 |
这在输出 SIS 参数(Exporting the SIS date)中会有说明 |
2、维护信息系统
维护信息系统(SIS)是一个在机器人控制器里的软件功能,其简单化了机器人系统的维护.其管理工作时间及模式,并在预定的维护时间到后为提醒操作人员。
(1)管理功能
计数器可以设为:
* 日历时间计数,基于日历时间的报警
* 工作时间计数,基于工作时间的报警
* 变速箱 1 的工作时间计数,基于变速箱 1 的维护周的百分比报警
* 变速箱 2 的工作时间计数,基于变速箱 2 的维护周 的百分比报警
* 变速箱 3 的工作时间计数,基于变速箱 3 的维护周 的百分比报警
* 变速箱 6 的工作时间计数,基于变速箱 6 的维护周 的百分比报警
下图显示了几种不同的选择
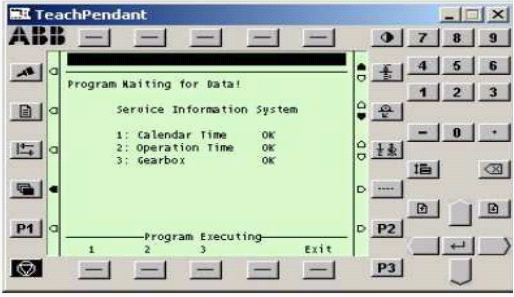 “OK”表示计数器里面没有维护时限到,如果有维护时间到,计数器的名字为变为”NOK”
“OK”表示计数器里面没有维护时限到,如果有维护时间到,计数器的名字为变为”NOK”
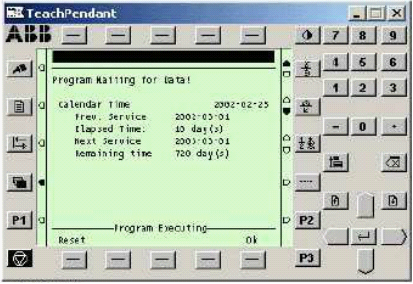
(2)日历时间(Calendar Time)
这是一个内部控制系统的时间,基于这个时间,可以设定维护周期
|
Prev service |
计数器上一次被复位的日期,也就是上次维护的 日期.如何输入 在设定 SIS 参数 (Setting the SIS parameters)中有说明 |
|
Elapsed time |
从上次复位到现在的时间 |
|
Next service |
计划中下次维护的时间. 如何输入在设定 SIS 参数 (Setting the SIS parameters)中有说明 |
|
Remaining time |
到下次维护所剩的时间 |
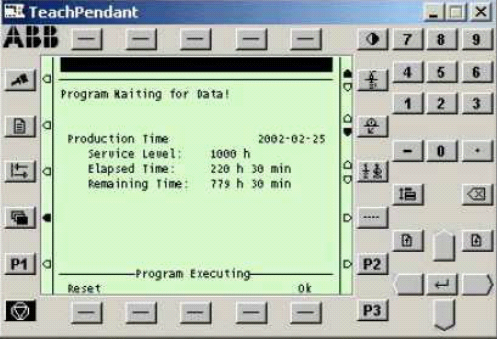
(3)工作时间(Operation time)
这是一个内部控制系统的时间,当电机开(MOTORS ON)信号激 活时开始计数.也就是机器人工作的时间.
|
Service interval |
指定的维护周期,如何输入在设定SIS参数(Setting the SIS parameters)中有说明 |
|
Elapsed time |
从上次复位到现在的时间 |
|
Remaining time |
到下次维护以前,剩余的工作时间 |
(4)变速箱(Gearbox)
基于度量单位,如扭矩(Torque)和转速(RPM),系统计算一个预期的维护周期,需要维护时,在示教器上会有显示,如何存取会在读出 SIS 的输出日志(Reading the SIS output logs)中说明.
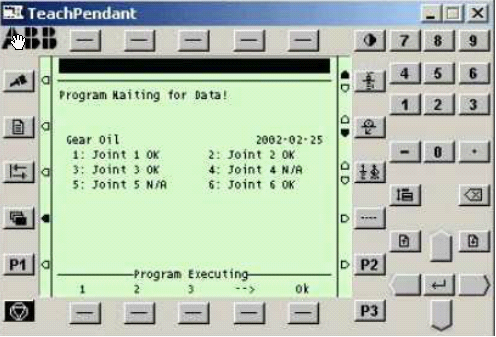
xis x OK 维护状态,也就是说自动计算出来的时间还没到
Axis x NOK 维护周期到
Axis x N/A 无可用的维护周期参数,用于轴 4 和 5
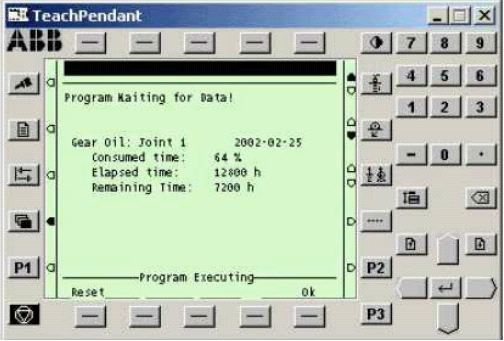
上图显示了轴 1 的例子,其它轴也如此
Consumed time 消耗的时间,占总时间的百分比
Elapsed time 从上次复位到现在的时间
Remaining time 到下次维护以前,剩余的工作时间
(5)复位 Reset Values
所有的计数器都可以随时复位
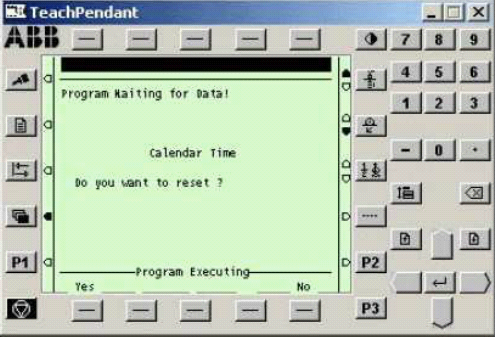
一旦复位,变量都 sisRestartDate 和 sisCalendarT 复位,如上图参数的说明,见参数输出(Exporting the SIS date)
Yes 将计数器复位到 0
No 不复位,并回到上级菜单
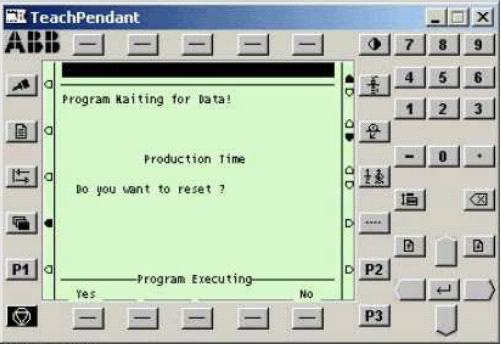
复位后,运行时间也被复位,如上图
Yes 将计数器复位到 0
No 不复位,并回到上级菜单
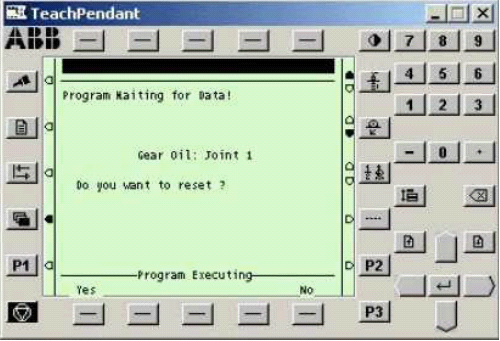
复位后,变量 sisL10h_x 和 sisL10h_Time 也被复位
Yes 将计数器复位到 0
No 不复位,并回到上级菜单
(6)达到维护周期
当超过维护周期的间隔时间后,一条信息(Service Service Interval exceeded Interval exceeded!)会显示在计数器的参数下方这个窗
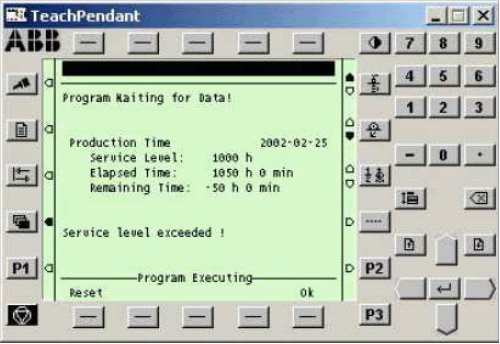
口可以在任何一个模式下显示,日历时间 (calendar time)运行 、 时间(operation time) 、变速箱时间(gearbox time)
另外,一条错误信息也会显示在示教器上
无可用的参数 对于所选的模式无可用参数,在窗口下方会有一条No date available 信息(No date available! )显示
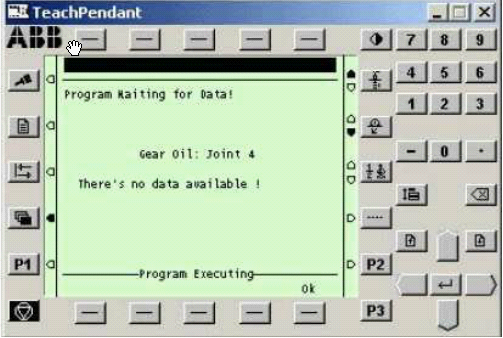
这个窗口可以在任何一个模式下显示,日历时间 (calendar time) 运行 、 时间(operation time) 、变速箱时间(gearbox time)
(7)退出
Exit
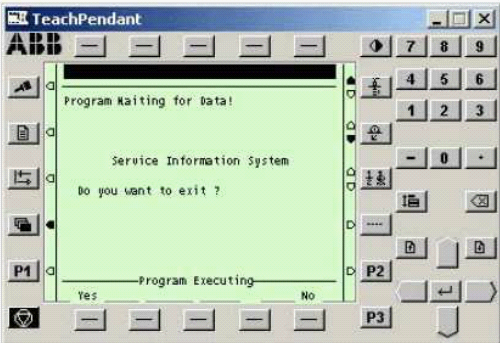
Yes 退出维护信息系统
No 回到维护信息系统
3、定义 SIS 输入参数
本节详细描述了可以被设定的各种参数.这些参数可以由对机器人的工作环境非常熟悉的人来设定.
由于计数器是由用户自定义,所以 ABB 不能提供任何推荐值
(1)被选参数的选项
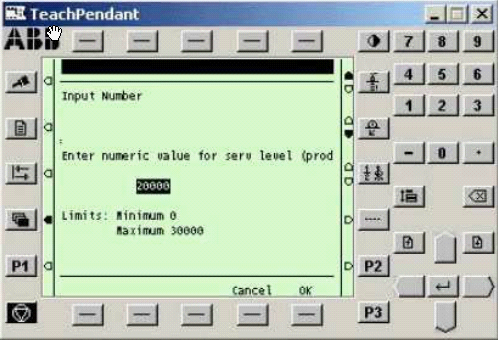
(2)运行时间限制(维护标准) Operation time limit(service level)
选择维护周期的运行小时数,例如,设定值为”20,000”,SIS 将会以这个时间标准来启动报警,
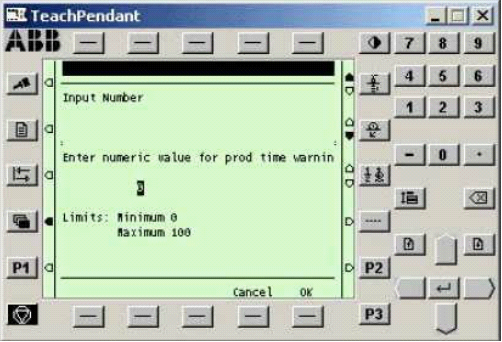
(3)运行时间报警(Operatiom time warning)
上面定义的运行时间限制(Operation time limit)的百分比,例如:设 定值为”90”,SIS 将会在上次复位后 18,000 小时过后报警
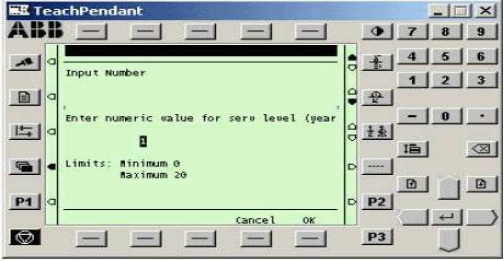
(4)日历时间限制 (维护标准)Calendar time limit(service level)
选择维护周期的年数,例如:设定值为”2”,SIS 系统会以这个时间作为报警标准
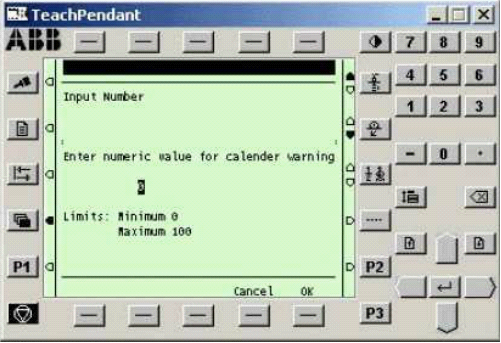
(5)日历时间报警(Calendar time warning)
上面所设定的日历时间(Calendar time limit)的百分比,例如:设定 值为”90”,系统将在上次复位后两年的90%也就是 657 天后报警
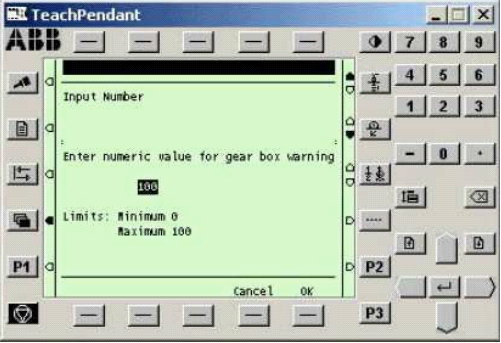
(6)变速箱报警(Gearbox warning)
系统计算的变速箱维护周期的百分比,例如,设定值为”90”,系统将会在超过预期的每个齿轮的维护时间的90%的时候报警。
机器人自动检测并收集所需要的变量来计算每个齿轮的维护周期这是一个从早期的运行中收集来的推断值,所收集的参数包括:
* 输入及输出扭矩
* 变速箱轴的速度
* 其它变量
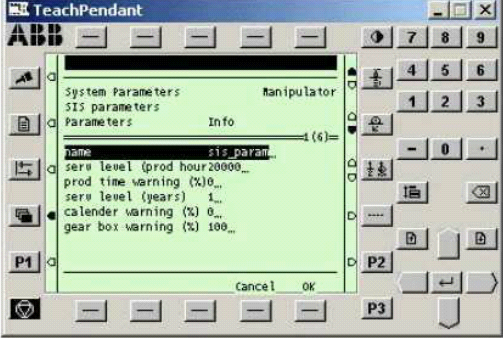
4、设置 SIS 参数
如果要 SIS 正常运行,需要设定大量参数,下面讲如何设定参数
步骤 这是一个介绍如何输入参数到系统的说明
(1)用示教器打开系统参数(System parameters)一栏
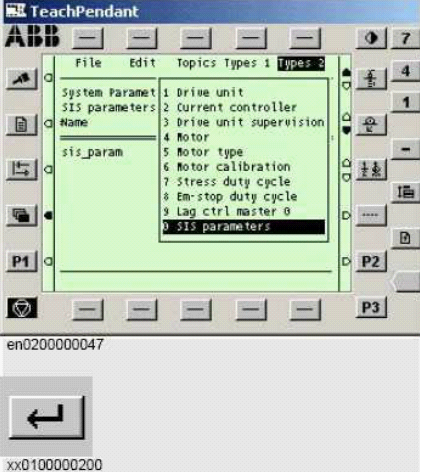
(2)再到“System parameter/Manipulator/type2”
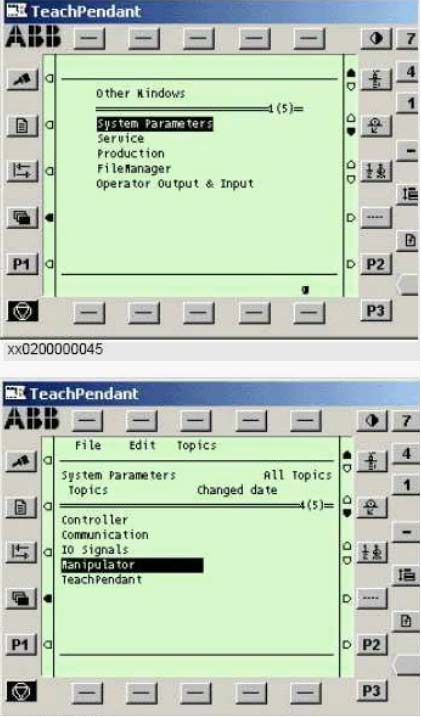
(3)选择“0 SIS parameters”并按回车“Enter”键
(4)选择需要的系统,然后参数清单将会显示出来
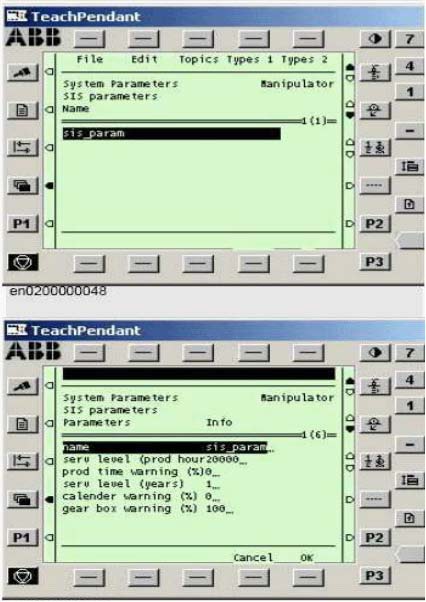
(5)在参数清单里面选择需要的参数,可用的参数在定义SIS 输入参数(Defining the SIS input parameters)里面有描述
5、只要满足设定条件(比如,达到维护前的最大运行时间),在操作日志里面将会有条信息显示
如何打开日并显示里面的内容,在用户指南User’s Guide)的维护(Service)里面有介绍

6、SIS 数据输出
本节描述了一些可以由外部计算机用“Webware SDK”运行软件检测到的变量,包含了一些超过维护周期的信息。
如何存取、如何在程序里运行这些变量在用户指南里有说明下表详细说明了一些外部计算机和SIS 通讯的信号的名字及功能 。
|
信号 |
单位 |
计数器形 |
功能 |
|
sisRestartDate |
秒 |
日历时间 |
上次启动或复位计数器的时 间, |
|
Calendar time |
以秒表示 | ||
|
sisCalendarT |
秒 |
日历时间 |
从上次启动或复位到现在的秒数 |
|
Calendar time |
|||
|
sisTotRun |
秒 |
运行时间 |
从系统启动到现在的总的运行时 |
|
Operatiom time |
间,与控制柜上的计数器一致 | ||
|
sisRunT |
秒 |
运行时间 |
从上次启动或复位到现在,计数 |
|
Operatiom time |
器记录的实际运行时间 | ||
|
sisL10h_1 |
秒 |
变速箱时间 |
变速箱 1 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_Time_1 |
秒 |
变速箱时间 |
变速箱 1 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_2 |
小时 |
变速箱时间 |
变速箱 2 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_Time_2 |
秒 |
变速箱时间 |
变速箱 2 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_3 |
小时 |
变速箱时间 |
变速箱 3 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_Time_3 |
秒 |
变速箱时间 |
变速箱 3 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_6 |
小时 |
变速箱时间 |
变速箱 6 的估计时间 |
|
Gearbox time |
|||
|
sisL10h_Time_6 秒 |
秒 |
变速箱时间 |
变速箱 6 的估计时间 |
|
Gearbox time |
上一篇:ABB机器人旋转关节的上紧
下一篇:ABB机器人日常检查
-
FANUC机器人对机器人三轴减速器进行拆卸

1.将机器人三轴马达的四个连接螺钉拆下,将马达取出。用M8六角将二轴轴臂与三轴减速器的连接螺钉拆下。M10螺钉18个均布,然后用M14六角将剩余的(M16)6个螺钉拆除对应的两个,把制作的M16导向杆安装到减速器上,再将剩下的四个螺钉拆下。
2012-07-18 -
FANUC机器人对机器人二轴的减速器进行安装

1.将机器人二轴减速器用吊环吊起,在一轴本体上安装两个M12的导向杆,将减速器安到导向杆上,平行推动到机器人本体上,安装螺钉 。2.利用手拉葫芦将二轴轴臂吊起 ,在减速器上安装两个导向杆,将二轴臂推入导向杆中。安装连接螺钉并紧固到力矩值。3
2012-07-18 -
FANUC机器人对机器人二轴的减速器进行拆卸

1.将机器人二轴马达拆掉,用M10的六角将机器人的二轴轴臂与减速器连接螺钉拆下,(M12)21个,然后用M14六角将剩余的(M16)6个螺钉拆除对应的两个,把制作的导向杆安装到减速器上,再将剩下的四个螺钉拆下。 2.将机器人二轴轴臂移
2012-07-18 -
FANUC机器人对机器人平衡缸及二轴马达进行拆卸

1.将机器人所有轴打到零点位置,用吊带将平衡缸吊住,用制作的50mm外六方扳手将平衡缸后端的缸杆连接螺母卸下,拆下平衡缸前后连接轴套,将机器人平衡缸吊起.放到安全位置。拆下机器人电缆,将吊装工具安装到机器人本体上。使用手拉葫芦将吊带吊住.2
2012-07-18

